Na razie łącze działa dla szerokiej gamy połączeń/złączy. Należy jednak wziąć pod uwagę nieobsługiwane funkcje.
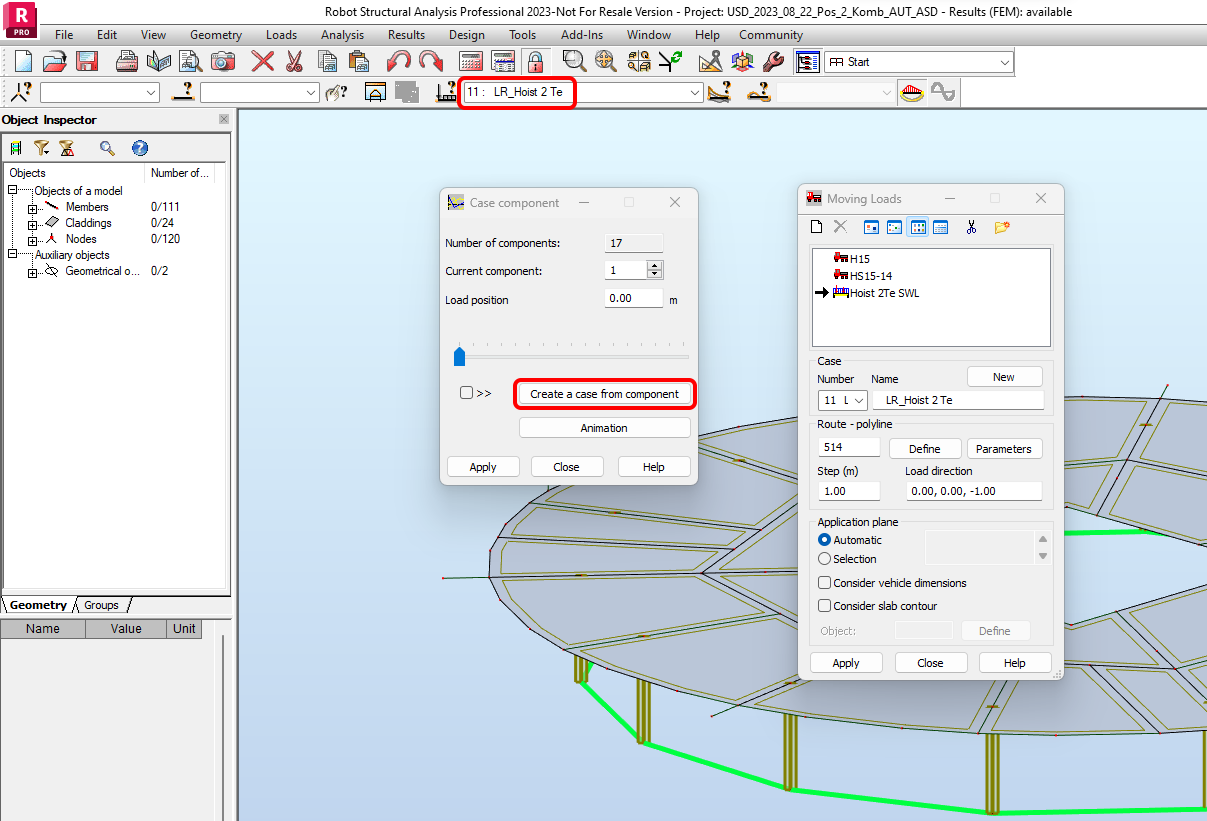
Ograniczenie: Ruchomy (stopniowany) przypadek obciążenia nie jest importowany do Checkbot. Kombinacje obciążeń zawierające ruchomy (stopniowany) przypadek obciążenia są importowane, jednak same ruchome (stopniowane) przypadki obciążeń oraz ich siły wewnętrzne nie są uwzględniane.
Obejście: Rozłóż ruchomy (stopniowany) przypadek obciążenia na pojedyncze przypadki obciążeń w Robot Structural Analysis za pomocą polecenia „Utwórz przypadek ze składowej". Następnie zaimportuj połączenie lub element, a te przypadki obciążeń zostaną zaimportowane oddzielnie i uwzględnione w zdefiniowanych kombinacjach obciążeń.
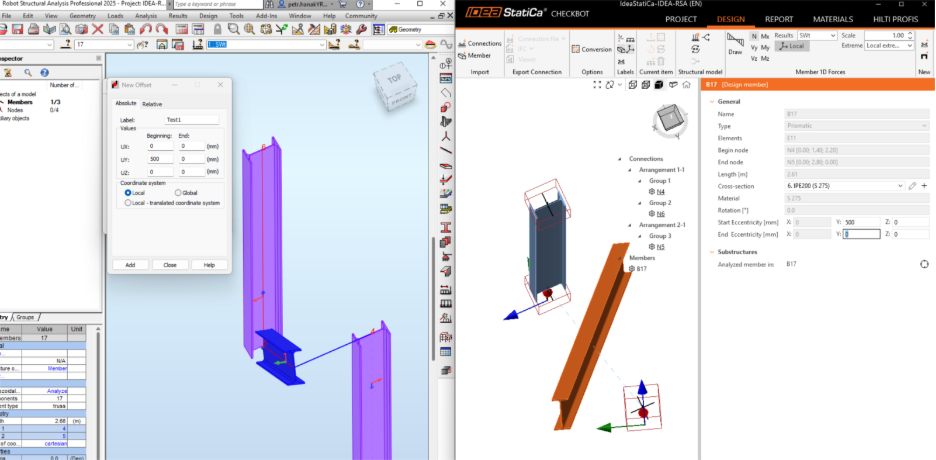
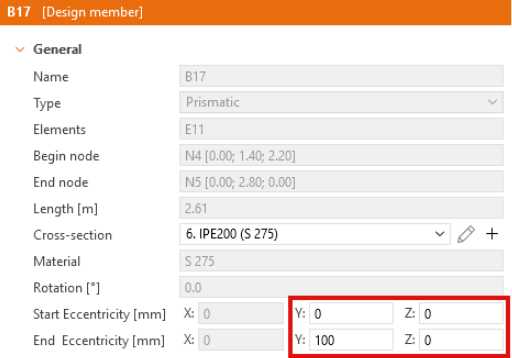
Ograniczenie: Zastosowanie różnych mimośrodów na początku i na końcu w Robot spowoduje, że ostateczna geometria elementów objętych tymi mimośrodami będzie różnić się w Robot i Checkbot. Przyczyną jest odmienny sposób stosowania tych mimośrodów w każdym z tych programów.
Obejście: Dostosuj geometrię za pomocą pozycji Mimośród początku i Mimośród końca w Checkbot, aby uzyskać żądaną geometrię.
Ograniczenie: Mimośród zdefiniowany tylko na jednym końcu w Robot – ten typ importu nie jest obsługiwany w Checkbot, a wynikowa geometria jest nieprawidłowa. Problem wynika z tego, że w Robot lokalny układ współrzędnych (LCS) elementu już uwzględnia zdefiniowany mimośród. Podczas importu do Checkbot element jest generowany na podstawie punktu początkowego i kierunku pobranego z LCS programu Robot. Powoduje to nieprawidłowe położenie elementu od samego początku. Ponadto mimośród zdefiniowany w Robot jest ponownie stosowany w Checkbot, co zwiększa rozbieżność i prowadzi do jeszcze większej różnicy między zamierzoną a zaimportowaną geometrią.
Obejście: Nie używaj jednostronnego mimośrodu w Robot; zamiast tego dostosuj go ręcznie w Checkbot po imporcie. Oznacza to jednak, że opcja synchronizacji nie może być używana.