สำหรับตอนนี้ ลิงก์ทำงานได้กับการเชื่อมต่อ/จุดต่อหลากหลายประเภท อย่างไรก็ตาม โปรดคำนึงถึงฟังก์ชันที่ไม่รองรับด้วย
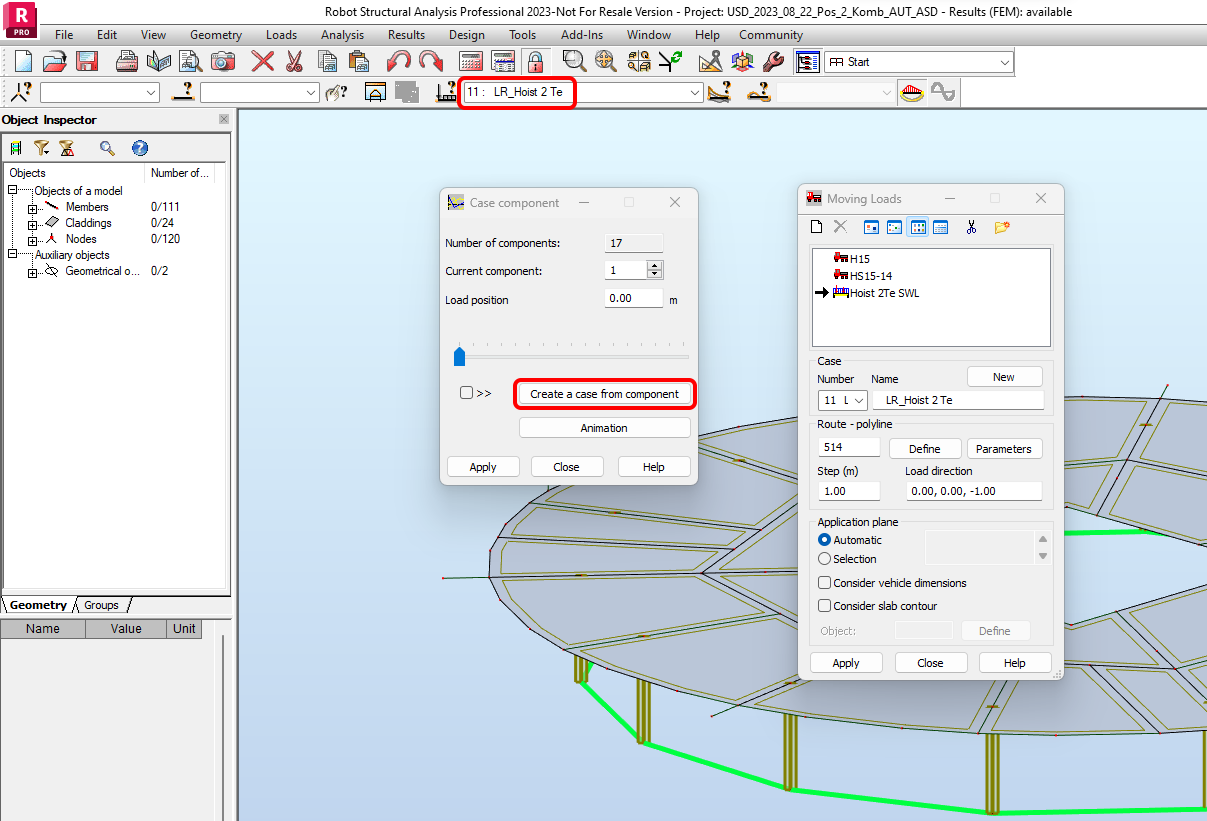
ข้อจำกัด: Load Case แบบเคลื่อนที่ (stepped) ไม่ถูกนำเข้าสู่ Checkbot การรวมแรง (Load combinations) ที่มี Load Case แบบเคลื่อนที่ (stepped) จะถูกนำเข้า แต่ Load Case แบบเคลื่อนที่ (stepped) และแรงภายในของ Load Case เหล่านั้นจะไม่รวมอยู่ด้วย
วิธีแก้ไข: แยก Load Case แบบเคลื่อนที่ (stepped) ออกเป็น Load Case เดี่ยวๆ ใน Robot Structural Analysis โดยใช้คำสั่ง "Create a case from component" จากนั้นนำเข้าการเชื่อมต่อหรือชิ้นส่วน และ Load Case เหล่านี้จะถูกนำเข้าแยกกัน รวมถึงรวมอยู่ใน Load combinations ที่กำหนดไว้ด้วย
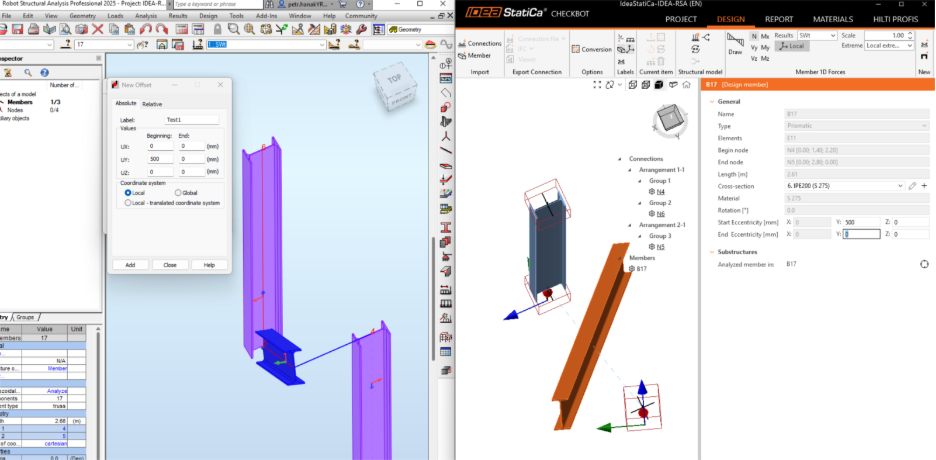
ข้อจำกัด: การใช้ค่า offset ที่แตกต่างกันที่จุดเริ่มต้นและจุดสิ้นสุดใน Robot จะทำให้รูปทรงเรขาคณิตสุดท้ายของส่วนประกอบที่ได้รับผลกระทบจาก offset เหล่านี้แตกต่างกันระหว่าง Robot และ Checkbot สาเหตุมาจากแนวทางการใช้ค่าความเยื้องศูนย์ (eccentricity) ที่แตกต่างกันในซอฟต์แวร์แต่ละตัว
วิธีแก้ไข: ปรับรูปทรงเรขาคณิตโดยใช้รายการ Start and End Eccentricity ใน Checkbot เพื่อให้ได้รูปทรงเรขาคณิตตามที่ต้องการ
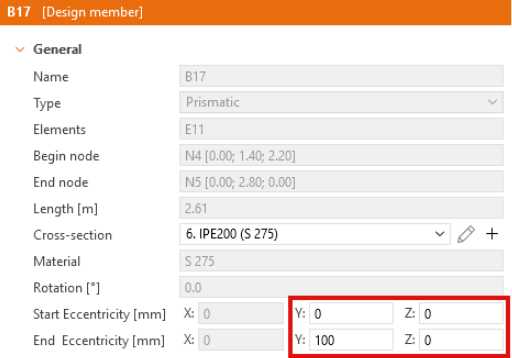
ข้อจำกัด: ค่าความเยื้องศูนย์ (Eccentricity) ที่กำหนดเพียงด้านเดียวใน Robot – การนำเข้าประเภทนี้ไม่รองรับใน Checkbot และรูปทรงเรขาคณิตที่ได้จะไม่ถูกต้อง ปัญหาเกิดขึ้นเนื่องจากใน Robot ระบบพิกัดท้องถิ่น (LCS) ของชิ้นส่วนได้รวมค่าความเยื้องศูนย์ที่กำหนดไว้แล้ว เมื่อนำเข้าสู่ Checkbot ชิ้นส่วนจะถูกสร้างขึ้นโดยอิงจากจุดเริ่มต้นและทิศทางที่นำมาจาก LCS ของ Robot ซึ่งทำให้องค์ประกอบถูกวางตำแหน่งไม่ถูกต้องตั้งแต่ต้น นอกจากนี้ ค่าความเยื้องศูนย์ที่กำหนดใน Robot จะถูกนำไปใช้อีกครั้งใน Checkbot ซึ่งเพิ่มความคลาดเคลื่อนและส่งผลให้เกิดความแตกต่างมากยิ่งขึ้นระหว่างรูปทรงเรขาคณิตที่ตั้งใจไว้และที่นำเข้ามา
วิธีแก้ไข: อย่าใช้ค่าความเยื้องศูนย์แบบด้านเดียวใน Robot แต่ให้ปรับด้วยตนเองใน Checkbot หลังจากนำเข้า อย่างไรก็ตาม วิธีนี้หมายความว่าไม่สามารถใช้ตัวเลือกการซิงโครไนซ์ได้