แนวทางความแข็งโดยตรง
แรงจูงใจ
การมีความเข้าใจอย่างลึกซึ้งเกี่ยวกับ การวิเคราะห์ไฟไนต์เอลิเมนต์ (FEA) เป็นสิ่งสำคัญอย่างยิ่งทั้งในการรับประกันความถูกต้องของข้อมูลนำเข้าและการนำเสนอผลลัพธ์ในรูปแบบที่เหมาะสม วัตถุประสงค์หลักของบทความนี้คือการอธิบายว่า เมทริกซ์ ถูกประกอบขึ้นในเบื้องหลังของซอฟต์แวร์ FEA ทุกตัวอย่างไร และ ความแข็งในการหมุน สามารถส่งผลต่อพฤติกรรมโดยรวมของโครงสร้างได้อย่างไร บทความนี้เป็นบทความเบื้องต้นสำหรับบทความที่กำลังจะมาถึง ซึ่งจะนำผลการค้นพบทั้งหมดไปประยุกต์ใช้กับโครงสร้างโดยใช้ IDEA StatiCa Connection
แนวทางความแข็งโดยตรง – การเชื่อมต่อแบบแข็ง
มาดูตัวอย่างง่ายๆ ของโครงสร้างที่แสดงในรูปที่ 1 โครงสร้างประกอบด้วยเสาและคานที่มีคุณสมบัติหน้าตัด HEA 200 เหมือนกัน แต่ละ Node มีสามองศาอิสระ ได้แก่ การเคลื่อนที่สองทิศทาง (X และ Z) และการหมุนหนึ่งทิศทาง (Ry) พื้นที่ทำงานเป็น 2 มิติ วัสดุเป็นเหล็กที่มีโมดูลัสความยืดหยุ่น 200,000 MPa
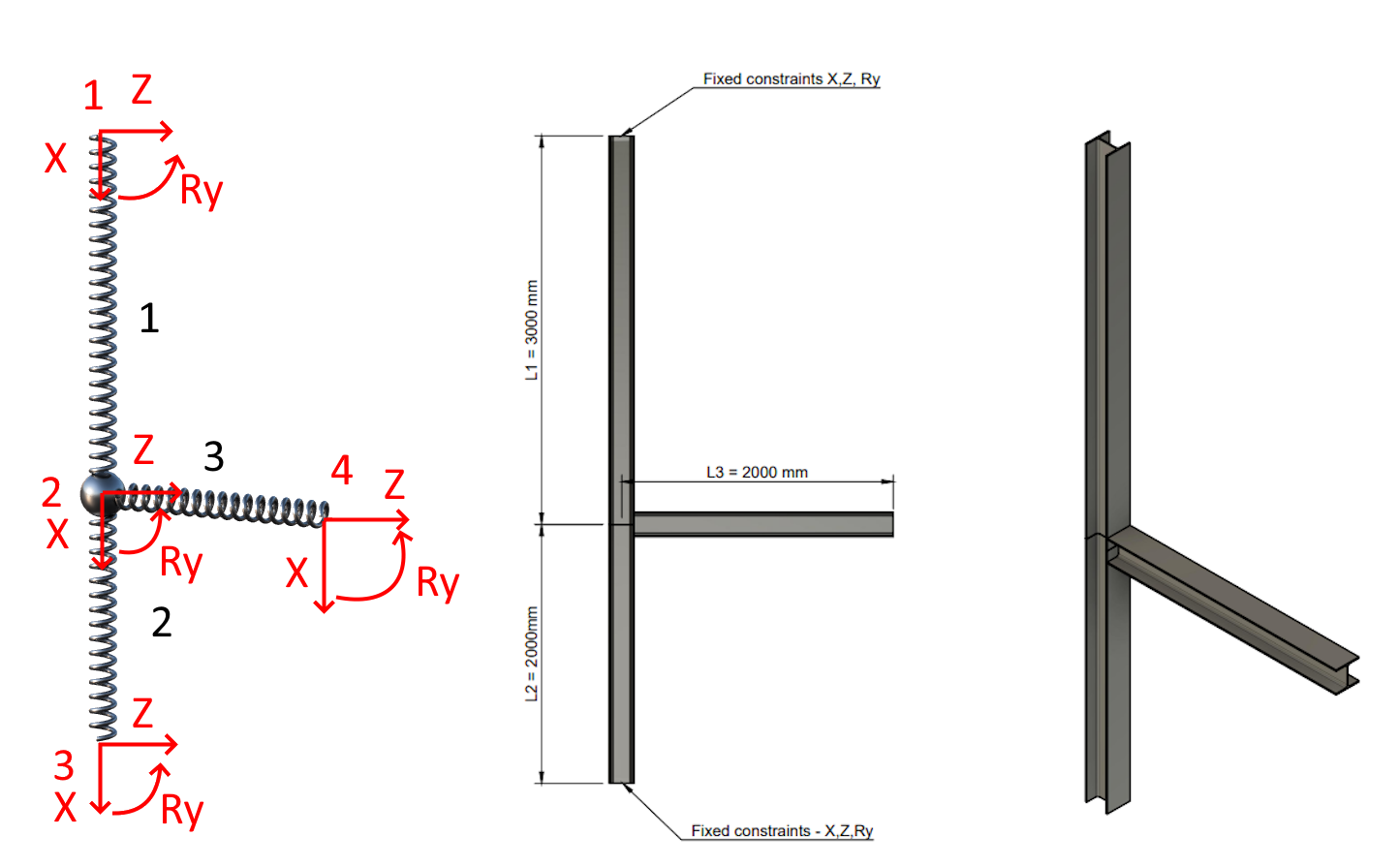
01) แบบจำลอง Spring-GCS, เรขาคณิต, แผนภาพแกนสามมิติ + หน้าตัด HEA 200
เมทริกซ์ความแข็งเฉพาะที่
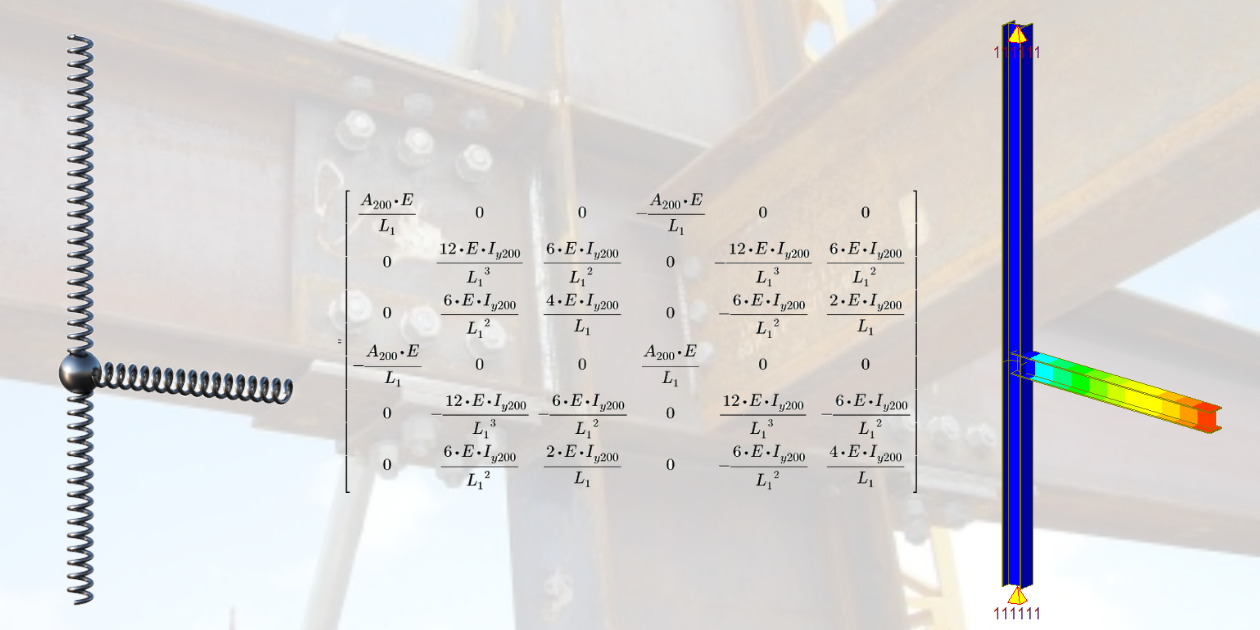
เมทริกซ์ความแข็งควบคุมความสัมพันธ์ระหว่างการเปลี่ยนแปลงของการเคลื่อนที่ (และการหมุน) ที่ปลายคานกับแรง (ปฏิกิริยา) ที่สอดคล้องกัน ควรสังเกตว่าแต่ละ Node ในพื้นที่ทำงาน 2 มิติมีสามองศาอิสระ (การเคลื่อนที่สองทิศทางและการหมุนหนึ่งทิศทาง) ส่งผลให้เมทริกซ์เฉพาะที่มีขนาด 6x6 เมทริกซ์นี้แสดงถึงความแข็งตามแนวแกน ความแข็งรับแรงเฉือน และความแข็งรับโมเมนต์ดัดของชิ้นส่วน
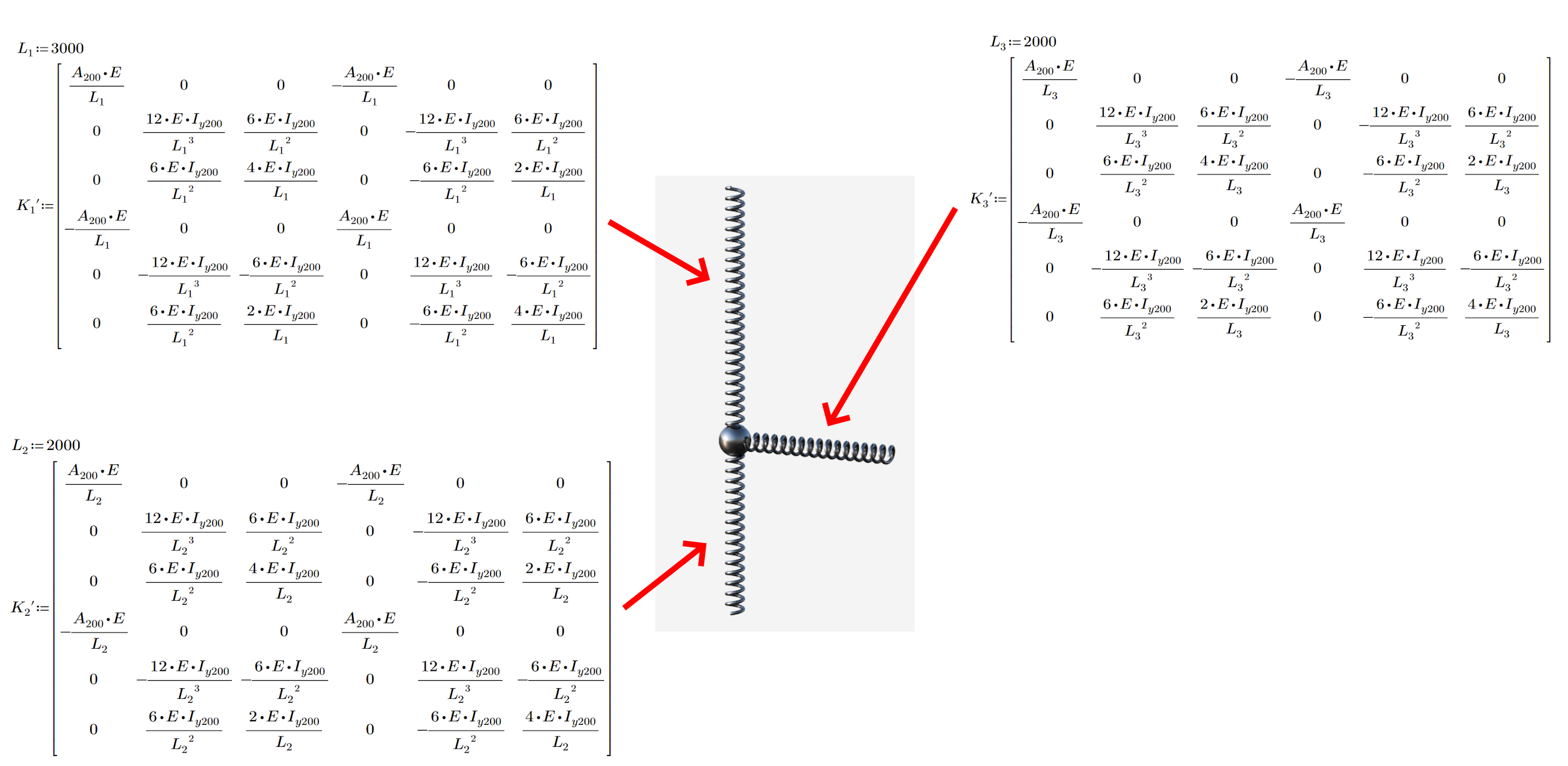
02) เมทริกซ์ความแข็งเฉพาะที่ของชิ้นส่วนทั้งหมด
เมทริกซ์การแปลงพิกัด
ในโครงสร้าง 90% เมทริกซ์ความแข็งเฉพาะที่ของชิ้นส่วนไม่สอดคล้องกับระบบพิกัดสากล เฉพาะคานธรรมดาที่เรียงตัวในแนวเส้นตรงเท่านั้นที่มีระบบพิกัดเฉพาะที่ (LCS) และระบบพิกัดสากล (GCS) เหมือนกัน ในกรณีของเรา ชิ้นส่วนที่สามถูกหมุน 90 องศารอบ Node ที่สอง การแปลงพิกัดนี้จำเป็นสำหรับการคำนวณที่จะตามมา

03) เมทริกซ์การแปลงพิกัดชิ้นส่วนที่ 1, 2; เมทริกซ์การแปลงพิกัดชิ้นส่วนที่ 3
การแปลงสู่ระบบพิกัดสากล
เพื่อการคำนวณการเคลื่อนที่ที่แม่นยำ จำเป็นต้องปรับระบบพิกัดของชิ้นส่วนทั้งหมดให้สอดคล้องกัน วิธีหนึ่งในการทำเช่นนี้คือการใช้เมทริกซ์การแปลงพิกัด ซึ่งช่วยลดความซับซ้อนของกระบวนการและช่วยให้การเปลี่ยนผ่านไปสู่การคำนวณการเคลื่อนที่เป็นไปอย่างราบรื่น การแปลงพิกัดไม่ได้ปรับเปลี่ยนเมทริกซ์สำหรับชิ้นส่วนที่หนึ่งและสอง เนื่องจากระบบพิกัดเฉพาะที่ของชิ้นส่วนเหล่านั้นเหมือนกับระบบพิกัดสากล อย่างไรก็ตาม คุณจะสังเกตเห็นการเปลี่ยนแปลงในชิ้นส่วนที่สาม ซึ่งถูกหมุนประมาณ 90 องศา ค่าสำหรับการเคลื่อนที่ในแนว X และ Z มีการเปลี่ยนแปลง คุณอาจสังเกตเห็นตัวเลขที่ไม่ใช่ศูนย์ขนาดเล็กในเมทริกซ์ ตัวเลขเหล่านี้มาจากกระบวนการเชิงตัวเลข แต่เนื่องจากมีขนาดเล็กมากเมื่อเทียบกับความแข็งโดยรวม จึงไม่ส่งผลกระทบต่อผลลัพธ์อย่างมีนัยสำคัญ
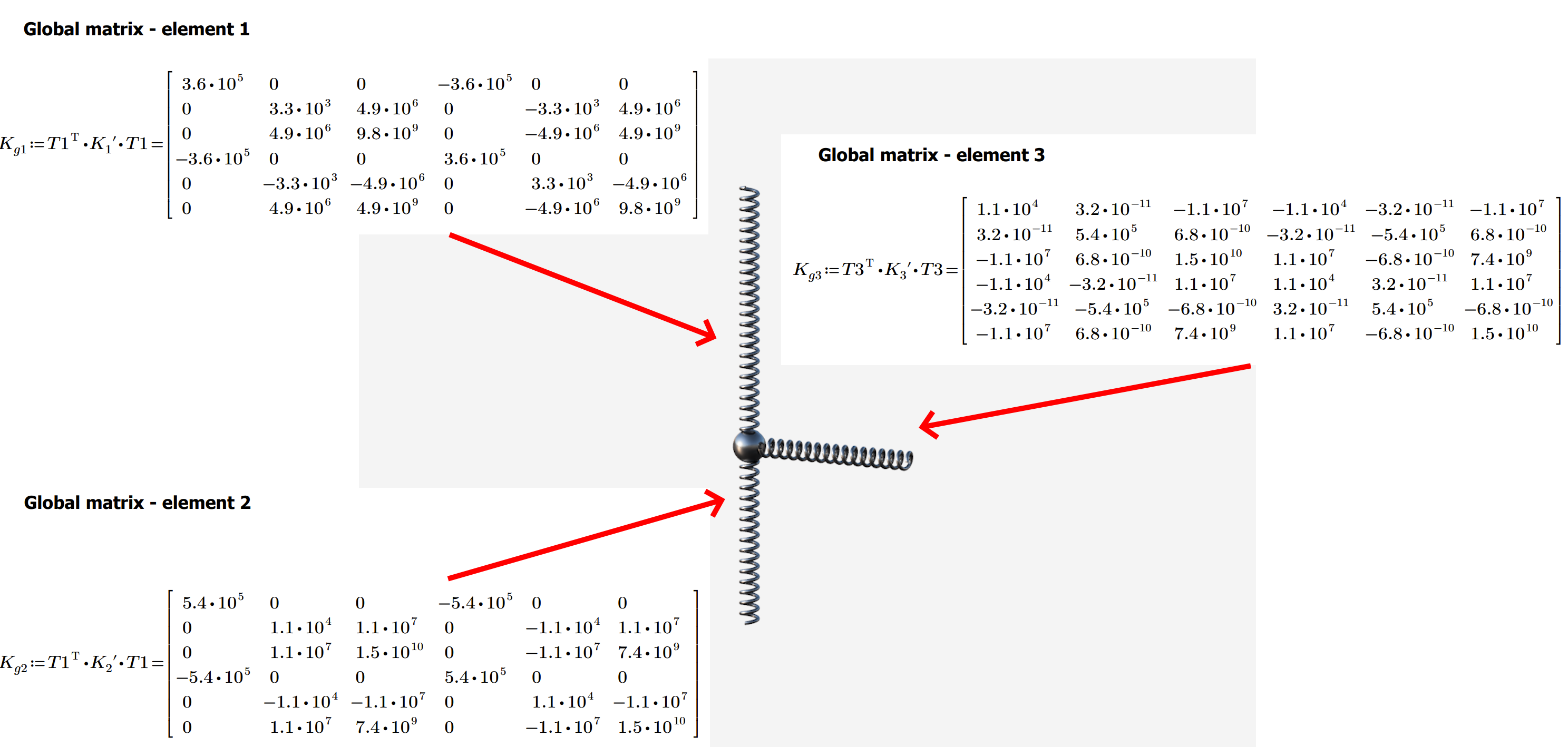
04) เมทริกซ์สากลชิ้นส่วนที่ 1, 2; เมทริกซ์สากลชิ้นส่วนที่ 3
เมทริกซ์สากล - การรวมค่า
คุณมีสี่ Node และแต่ละ Node มีสามองศาอิสระ ซึ่งหมายความว่าเมทริกซ์ผลลัพธ์มีขนาด 12x12 ส่วนสำคัญของกระบวนการคือการรวมค่าในคอลัมน์และแถวจากเมทริกซ์แต่ละตัวเข้าสู่เมทริกซ์สากล
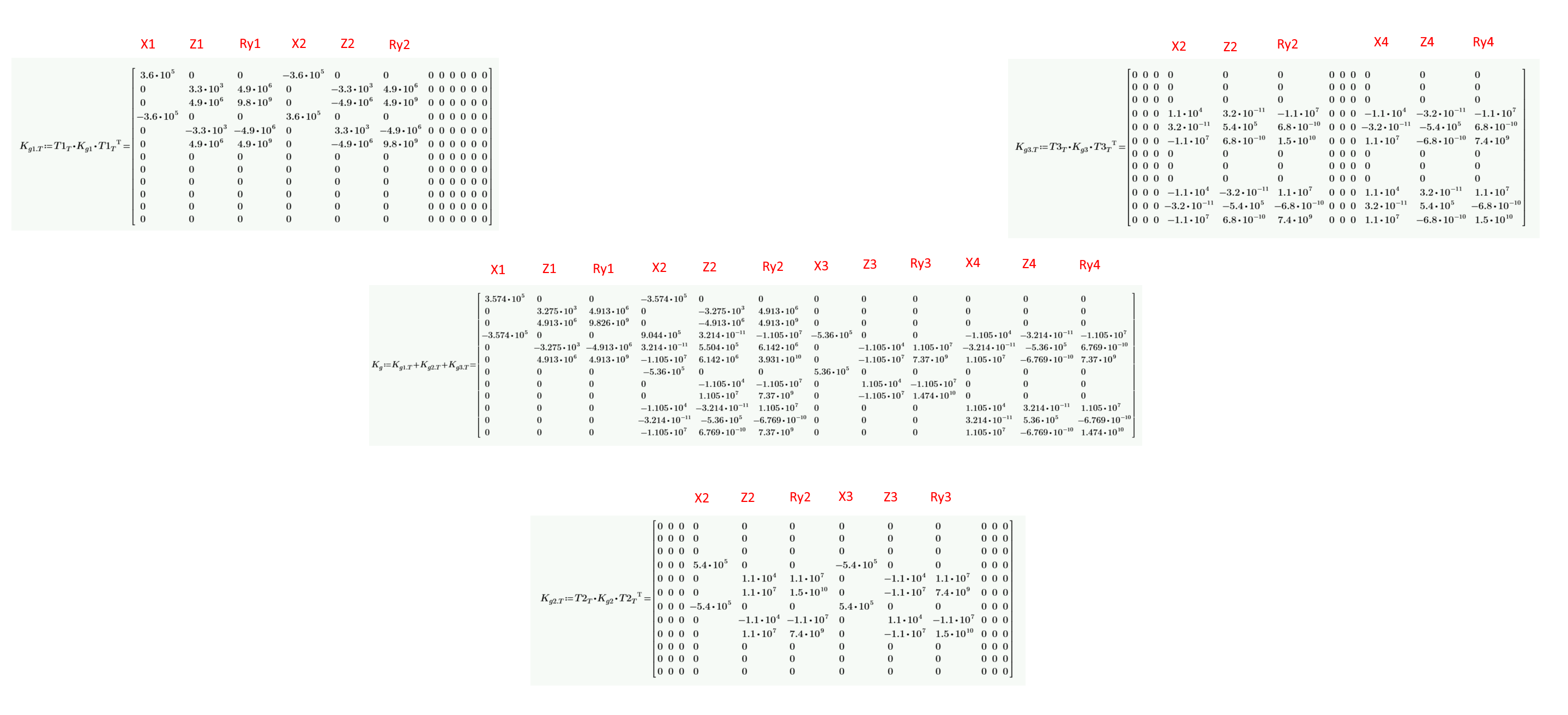
05) เมทริกซ์ความแข็งสากลของระบบทั้งหมด
เงื่อนไขขอบเขตและเวกเตอร์แรงกระทำ
หากไม่มีเงื่อนไขขอบเขต ระบบจะมีตัวแปรไม่เพียงพอ (และสามารถหาได้เฉพาะคำตอบที่ไม่มีนัยสำคัญเท่านั้น) ในสถานการณ์นี้ พิจารณาข้อจำกัดแบบยึดแน่นที่ Node ที่หนึ่งและสาม การเคลื่อนที่ (และการหมุน) ที่ขอบเขตเป็นศูนย์สามารถแสดงได้โดยการตัดแถวและคอลัมน์ที่สอดคล้องกันออก คำตอบจะไม่มีนัยสำคัญหากไม่มีแรงกระทำ (การเคลื่อนที่เป็นศูนย์) ในตัวอย่างของเรา Node ที่สี่ถูกกระทำโดยแรงในแนวดิ่ง 50 kN

06) เมทริกซ์ที่ลดขนาดแล้ว เวกเตอร์แรงกระทำ และเงื่อนไขขอบเขตที่ใช้
การแก้ปัญหา
โดยคำนึงถึงการเสียรูปขนาดเล็กและวัสดุที่มีพฤติกรรมยืดหยุ่นเชิงเส้น เราสามารถแก้เวกเตอร์ของการเคลื่อนที่ที่ไม่ทราบค่าได้อย่างง่ายดายในขั้นตอนเดียว แนวทางนี้รวดเร็วและมีประสิทธิภาพสูง ทำให้เป็นวิธีที่สะดวกสำหรับการแก้ปัญหาที่เกี่ยวข้องกับการเคลื่อนที่
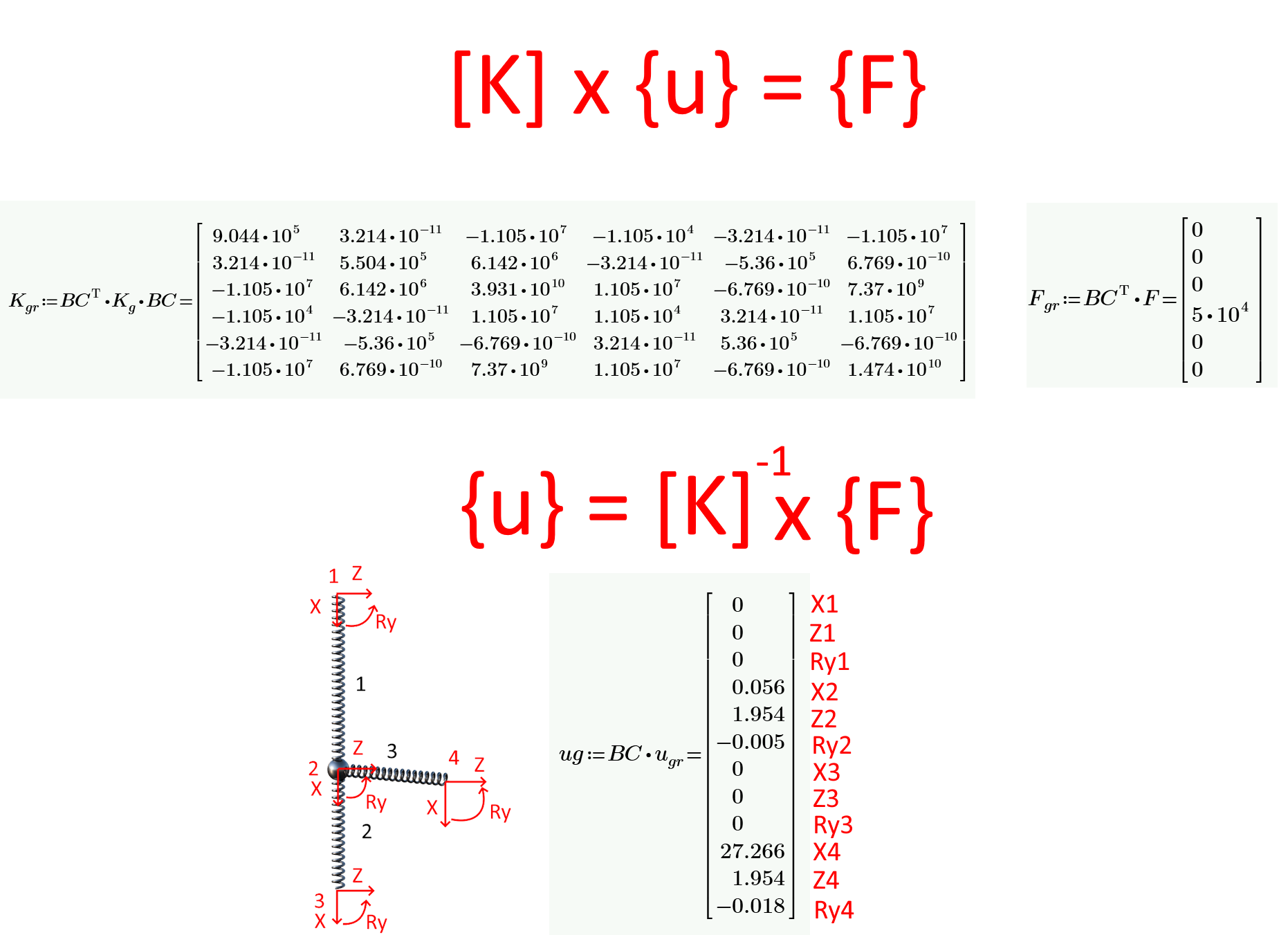
07) การเคลื่อนที่ของ Node ใน GCS
การตรวจสอบ FEA
เนื่องจากค่าที่ให้ไว้สำหรับ Node มีความแม่นยำ จึงจำเป็นอย่างยิ่งที่ผลลัพธ์ของ การวิเคราะห์ไฟไนต์เอลิเมนต์ (FEA) ต้องสอดคล้องกับผลลัพธ์ของแนวทางความแข็งโดยตรง (DSA) อย่างแน่นอน ข้อกำหนดนี้รับประกันว่าผลการวิเคราะห์สอดคล้องกับพฤติกรรมจริงของระบบที่กำลังศึกษา ดังนั้น จึงเป็นสิ่งสำคัญที่ต้องรับประกันว่าผลลัพธ์ของ FEA และ DSA ตรงกันภายในระดับความคลาดเคลื่อนที่ยอมรับได้
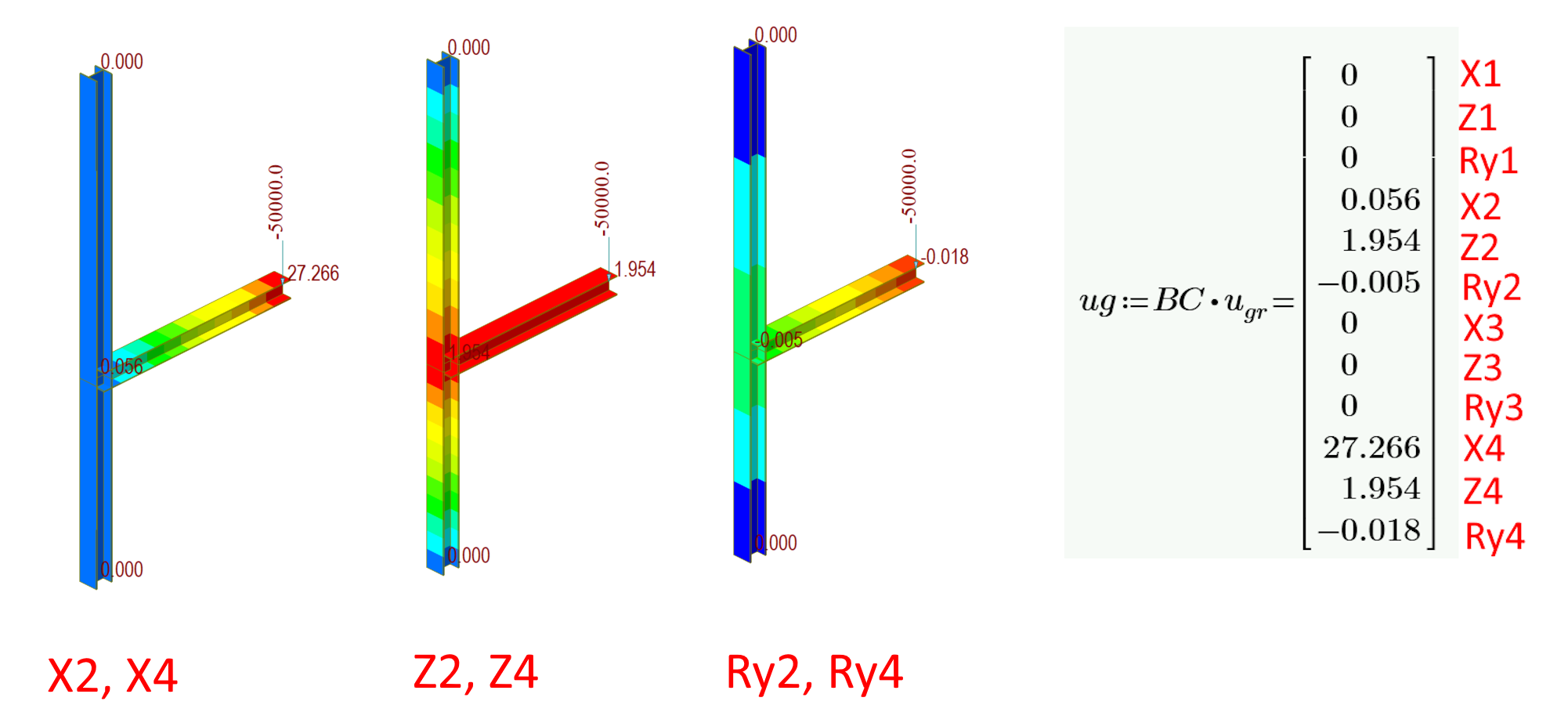
08) การตรวจสอบและเปรียบเทียบการเคลื่อนที่ของ Node ระหว่าง DSA และ FEA
แนวทางความแข็งโดยตรง – การเชื่อมต่อแบบกึ่งแข็ง
การเข้าใจว่าการเชื่อมต่อโดยทั่วไปเป็นแบบกึ่งแข็งและไม่ได้แข็งทั้งหมดหรือแบบหมุนได้เป็นสิ่งสำคัญ การละเลยความแข็งของการเชื่อมต่ออาจส่งผลให้พฤติกรรมของโครงสร้างในแบบจำลองแตกต่างจากโครงสร้างจริง มาเจาะลึกว่าความแข็งถูกนำมาพิจารณาในการคำนวณอย่างไร และส่งผลต่อพฤติกรรมของโครงสร้างอย่างไร
Spring หมุนและโครงสร้างทางวิศวกรรมโยธา
โครงสร้างเหล็กทางวิศวกรรมโยธา เช่น โรงงานและโครงกรอบ ได้รับการออกแบบให้รับโหลดดัดที่ถ่ายโอนอย่างมีประสิทธิภาพผ่านคาน เมื่อคานรับโหลดและโครงสร้างเป็นแบบ hyperstatic ความแข็งในการหมุนของจุดต่อมีบทบาทสำคัญในการรับประกันการกระจายโหลดที่ถูกต้องและการเสียรูปที่แม่นยำ นี่คือเหตุผลที่การรักษาความสมบูรณ์ของโครงสร้างของจุดต่อเป็นสิ่งสำคัญเพื่อป้องกันความเสียหายที่อาจเกิดขึ้นกับโครงสร้าง
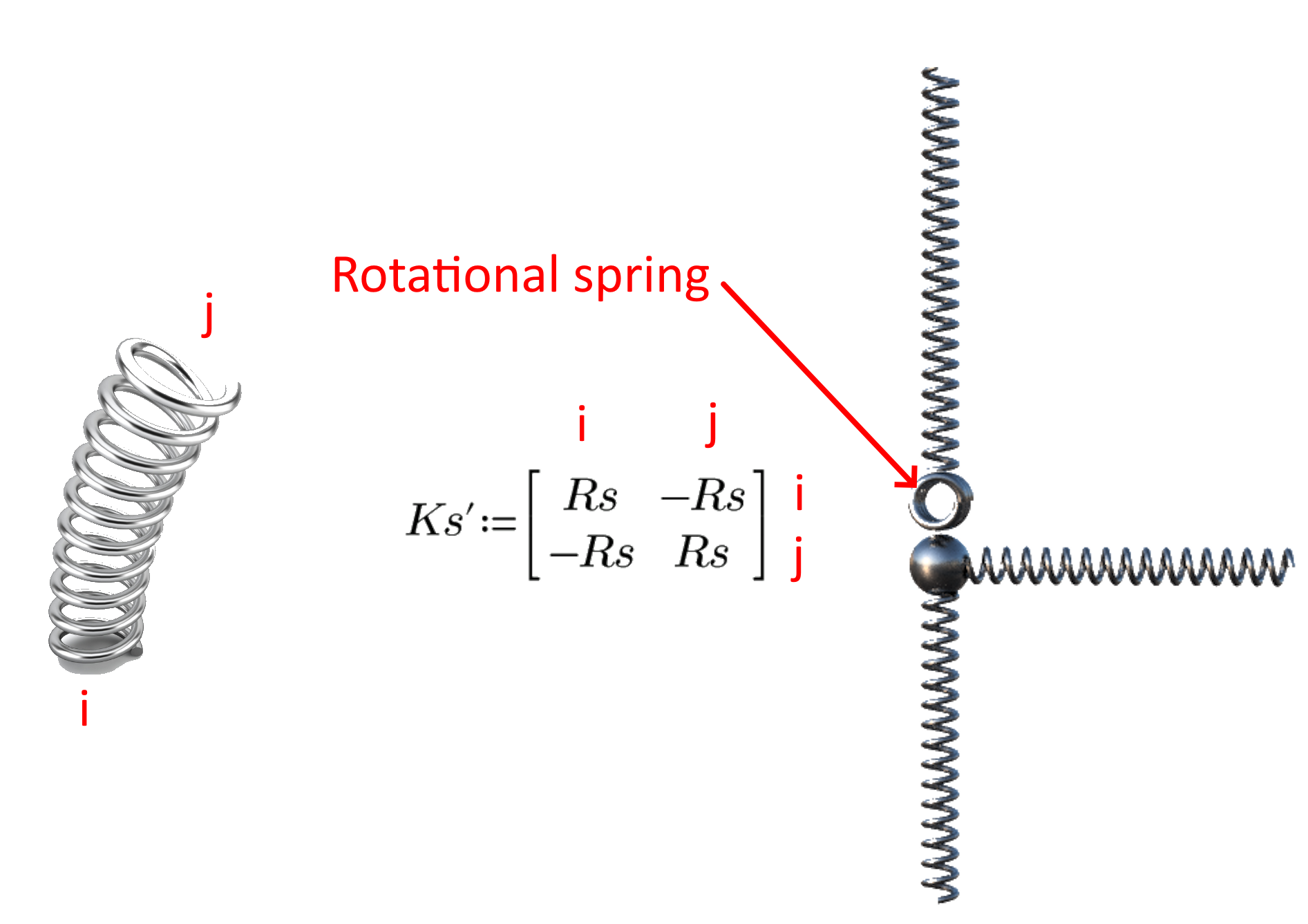
09) Spring หมุน - เมทริกซ์เฉพาะที่
เพื่อรับประกันความเข้ากันได้ในจุดต่อ สิ่งสำคัญคือต้องเชื่อมโยงการเสียรูป การเชื่อมโยงนี้ควรรวมอยู่ในเมทริกซ์ความแข็งสากลเพื่อคำนวณการเสียรูป เมื่อใช้ความแข็งในการหมุน องศาอิสระอื่นๆ จะต้องรวมอยู่เป็นแถวและคอลัมน์เพิ่มเติมในเมทริกซ์ความแข็งสากล เมทริกซ์สุดท้ายสำหรับจุดต่อประเภทนี้จะมีขนาด 13x13 ในขณะที่เมทริกซ์การเชื่อมต่อแบบแข็งจะมีขนาด 12x12
ผลกระทบของความแข็งในการหมุน
ความแข็งในการหมุนของโครงสร้างมีผลกระทบอย่างมีนัยสำคัญต่อการกระจายแรงและการเกิดการเสียรูป ซึ่งหมายความว่าโครงสร้างที่มีความแข็งในการหมุนจะมีพฤติกรรมแตกต่างจากโครงสร้างที่มีการเชื่อมต่อแบบแข็งหรือแบบหมุนได้ หากความแข็งเพิ่มขึ้นอย่างไม่สมส่วน อาจนำไปสู่การเปลี่ยนแปลงพฤติกรรมของโครงสร้างเพิ่มเติม ในสถานการณ์นี้ เราจะสำรวจผลกระทบของความแข็งในการหมุนที่เพิ่มขึ้น แบบจำลองที่เราใช้งานมาจากบทก่อนหน้า และ Spring หมุนถูกติดตั้งที่ปลาย (j) ของชิ้นส่วนที่หนึ่ง
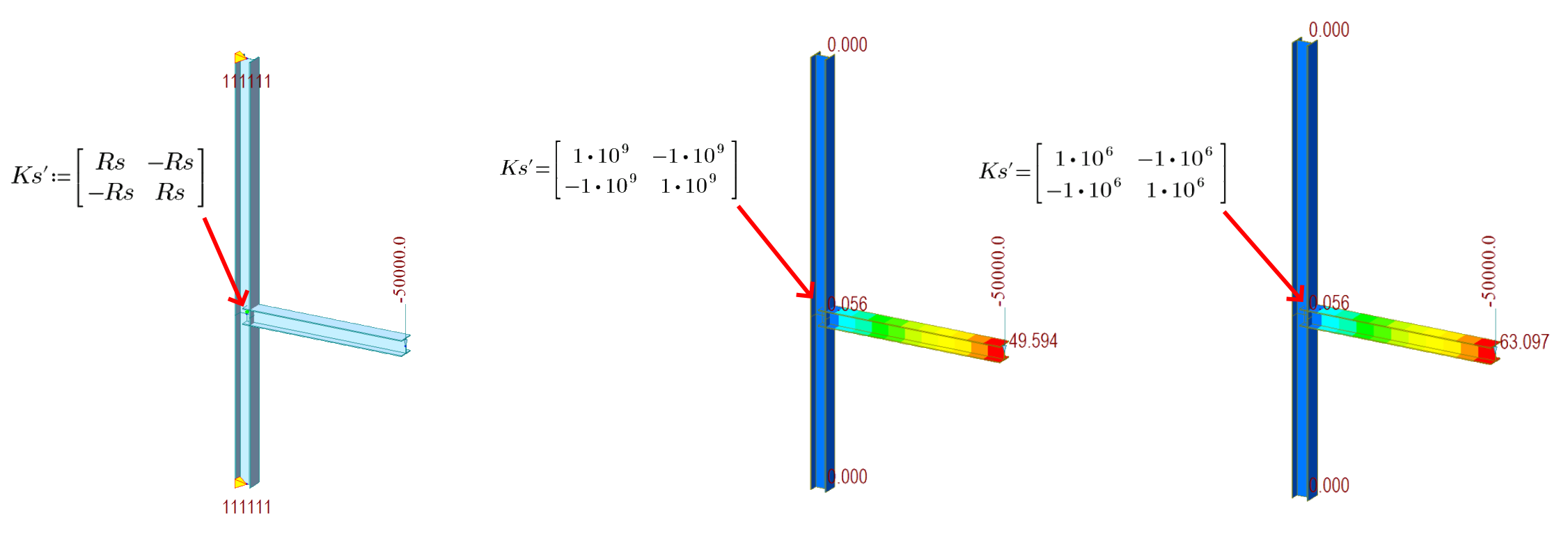
10) การเสียรูปสำหรับความแข็งในการหมุนที่แตกต่างกัน
กราฟแสดงให้เห็นว่าในช่วงความแข็งบางช่วง การเสียรูปเปลี่ยนแปลงในลักษณะหลายเชิงเส้นสำหรับการเชื่อมต่อแบบกึ่งแข็ง สำหรับการเชื่อมต่อแบบกึ่งแข็ง การประเมินหรือประเมินความแข็งเกินจริงนำไปสู่ความแตกต่างอย่างมีนัยสำคัญในการโก่งตัวและการกระจายแรงภายใน
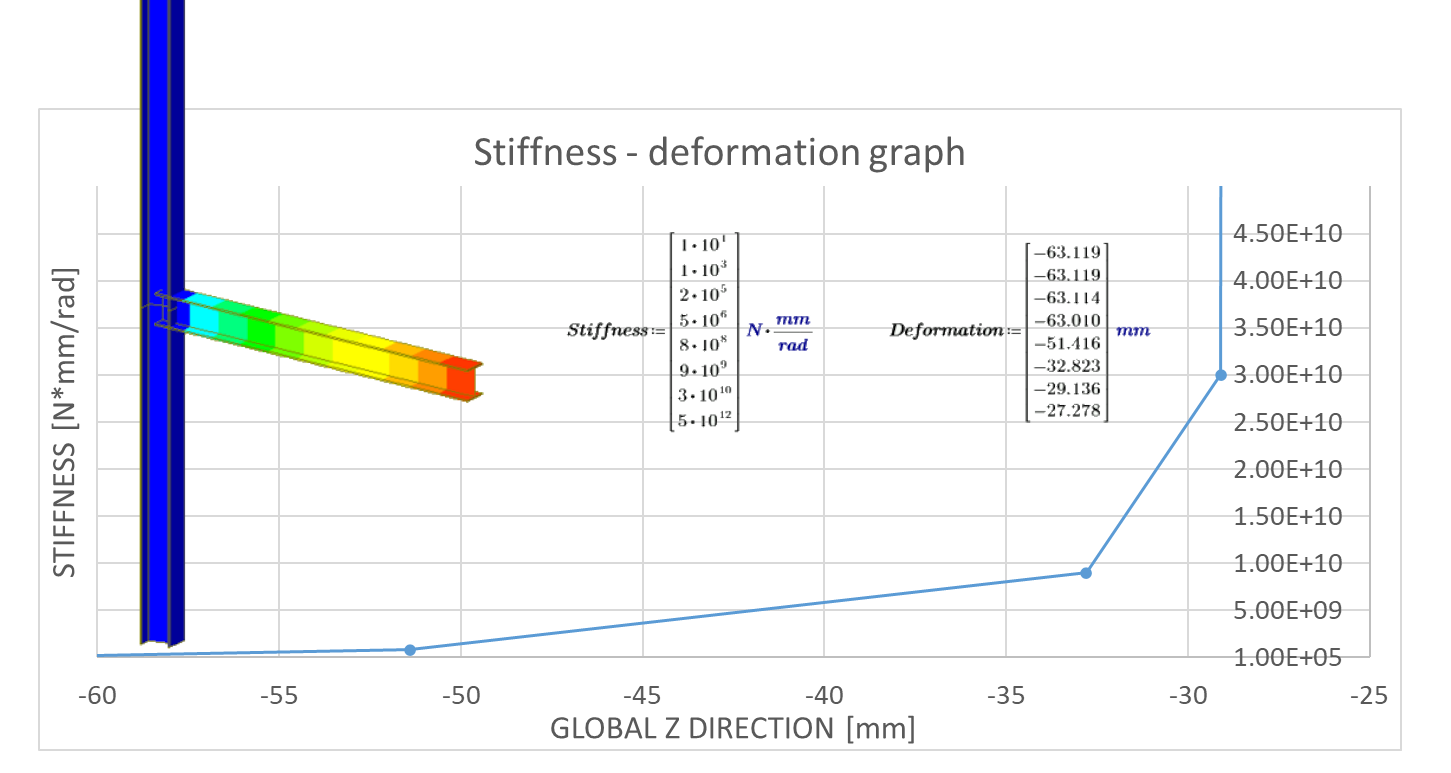
11) กราฟความแข็ง – การเสียรูป
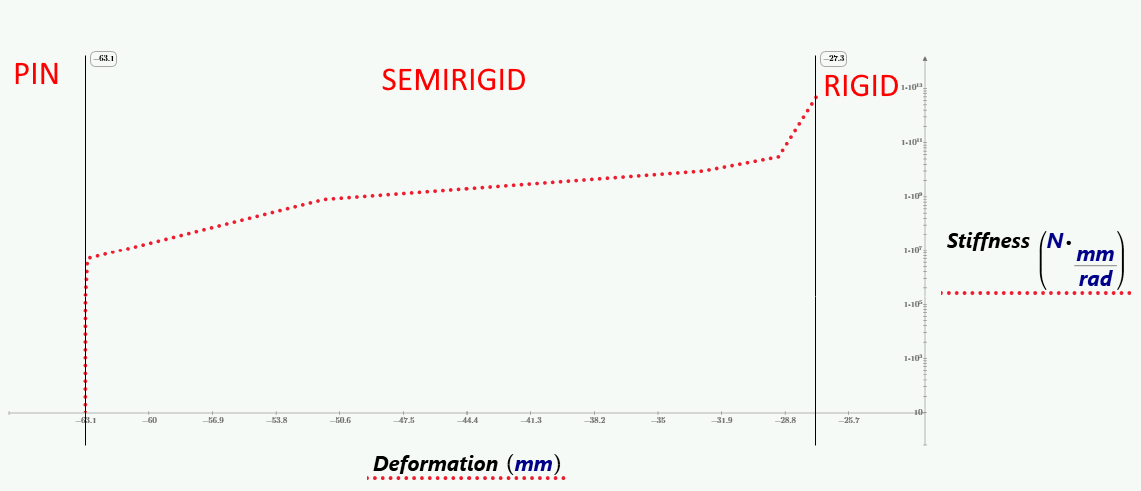
12) โซนความแข็งสำหรับการเชื่อมต่อ
บทสรุปและหัวข้อที่กำลังจะมาถึง
เพื่อรับประกันความสำเร็จของการศึกษาที่กำลังจะมาถึง คุณต้องได้รับความเข้าใจอย่างลึกซึ้งเกี่ยวกับปัญหาที่กำลังพิจารณาก่อน เมื่อนั้นเท่านั้นคุณจึงจะสามารถก้าวต่อไปด้วยความมั่นใจและมีจุดมุ่งหมาย การศึกษาของเรามุ่งเน้นการสำรวจหัวข้อสำคัญต่างๆ ที่เกี่ยวข้องกับประเด็นที่เรากำลังตรวจสอบ ผ่านการวิจัยและการวิเคราะห์อย่างรอบคอบ เราหวังว่าจะสามารถให้มุมมองใหม่เกี่ยวกับปัญหาที่ซับซ้อนและท้าทายนี้ และในที่สุดมีส่วนร่วมในการทำความเข้าใจที่ดีขึ้นในด้านการศึกษาที่สำคัญนี้
- ความแข็งในการหมุนถูกคำนวณใน IDEA StatiCa อย่างไร
- วิธีใช้ความแข็งสำหรับชิ้นส่วนหลายชิ้นในเครื่องมือ FEA
- การตรวจสอบความแข็งในการหมุนระหว่าง IDEA StatiCa และ ABAQUS สำหรับการเชื่อมต่อแผ่นต่อแผ่น
ลองใช้ IDEA StatiCa ฟรี

