Doğrudan rijitlik yöntemi
Motivasyon
Sonlu Elemanlar Analizi (SEA) hakkında derin bir anlayışa sahip olmak, hem doğru girdilerin sağlanması hem de sonuçların doğru biçimde sunulması açısından kritik öneme sahiptir. Bu makalenin temel amacı, her SEA yazılımının arka planında matrisin nasıl oluşturulduğunu ve dönme rijitliğinin bir yapının genel davranışını nasıl etkileyebileceğini açıklamaktır. Bu makale, tüm bulguların IDEA StatiCa Connection kullanılarak bir yapıya uygulanacağı yaklaşan bir makale için ön koşul niteliği taşımaktadır.
Doğrudan rijitlik yaklaşımı – rijit birleşimler
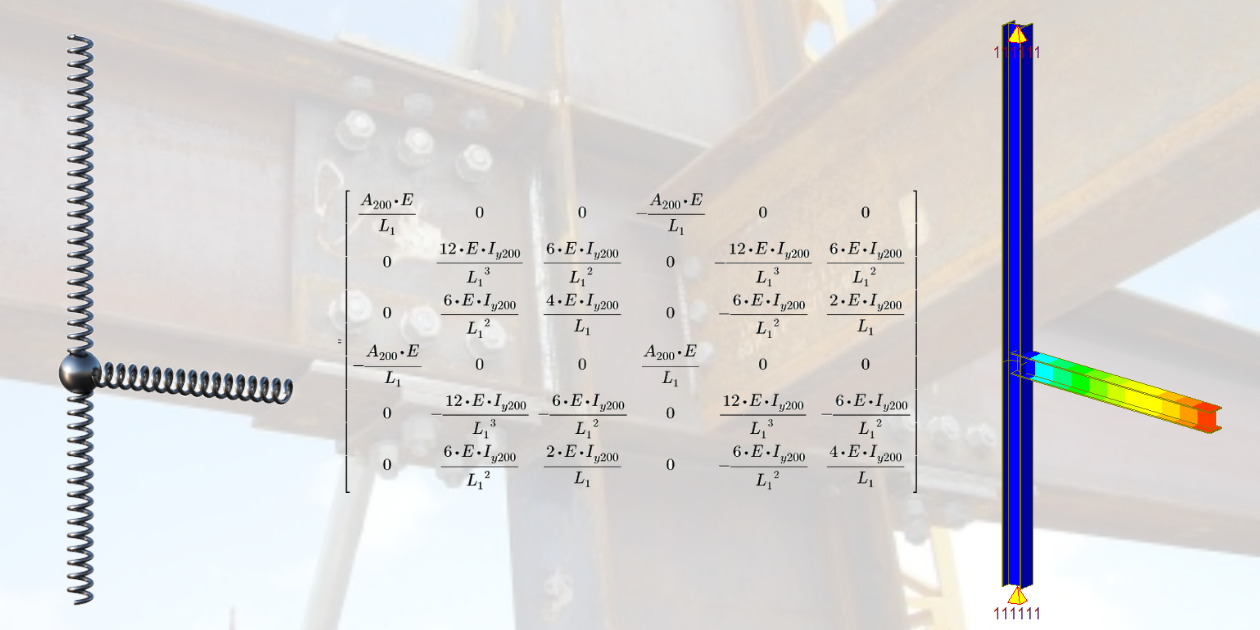
Şekil 1'de gösterilen yapının basit örneğine bir göz atalım. Yapı, özdeş HEA 200 kesit özelliklerine sahip bir kolon ve bir kirişten oluşmaktadır. Her düğüm noktası, iki öteleme (X ve Z) ve bir dönme (Ry) olmak üzere üç serbestlik derecesine sahiptir. Çalışma alanı 2B'dir. Malzeme, elastisite modülü 200.000 MPa olan çeliktir.
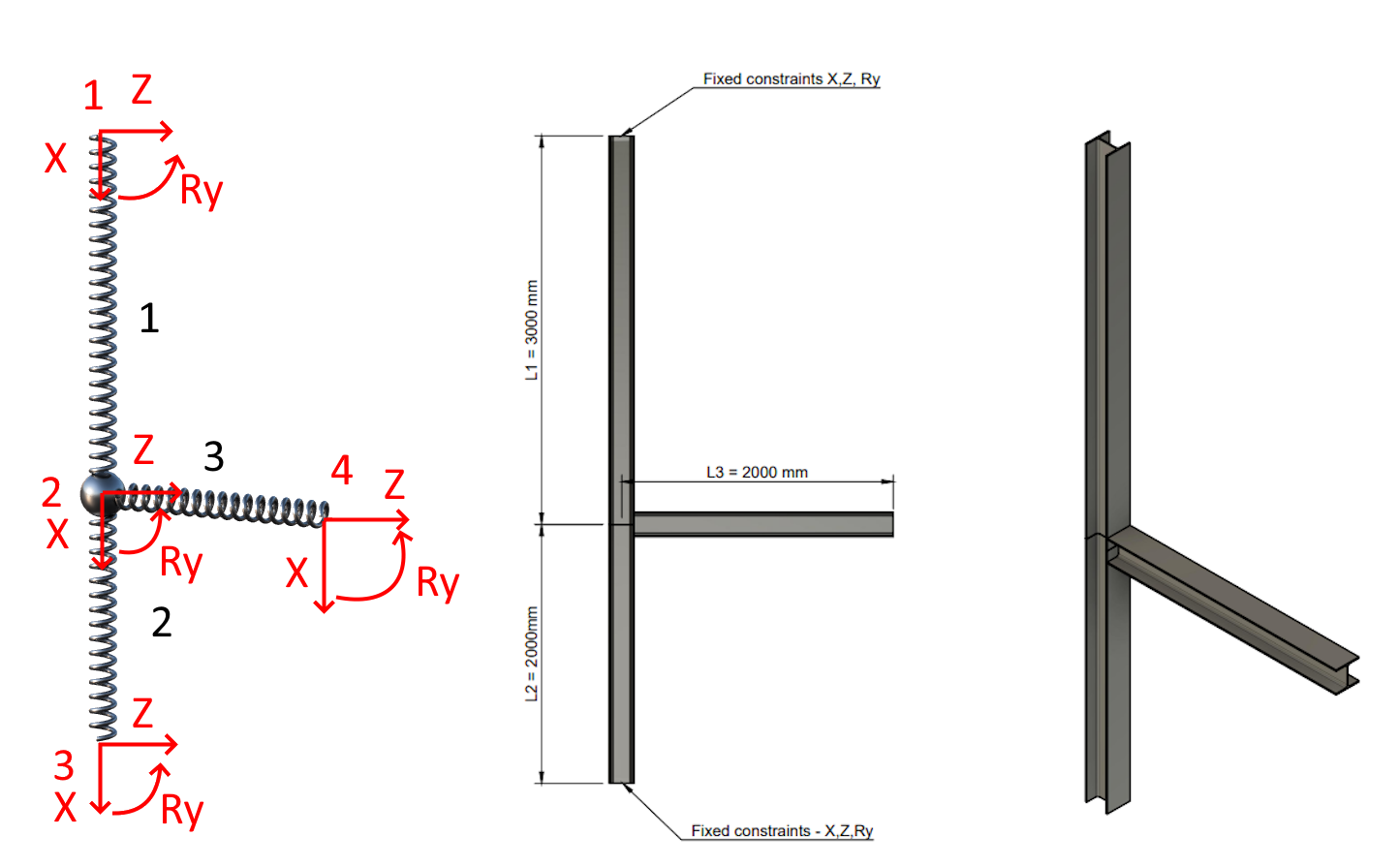
01) Yay modeli-GCS, geometri, aksonometri + HEA 200 kesitleri
Yerel rijitlik matrisi
Rijitlik matrisi, kiriş uçlarındaki deplasman (ve dönme) değişimleri ile buna karşılık gelen kuvvetler (reaksiyonlar) arasındaki ilişkiyi yönetir. Her 2B düğüm noktasının üç serbestlik derecesine (iki öteleme ve bir dönme) sahip olduğunu belirtmek gerekir; bu durum, boyutları 6x6 olan yerel bir matris oluşturur. Bu matris, elemanın normal rijitliğini, kayma rijitliğini ve eğilme rijitliğini temsil eder.
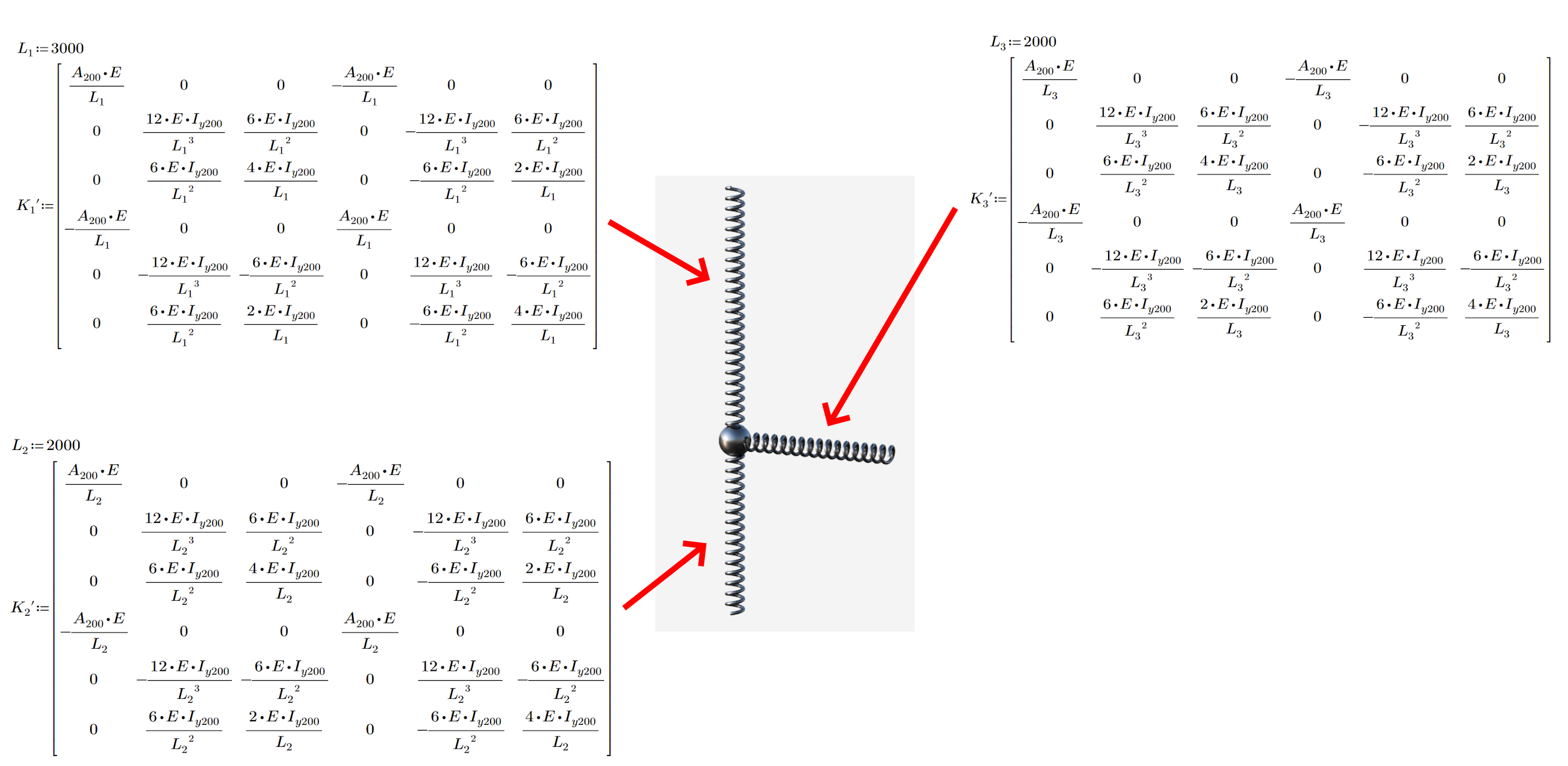
02) Tüm elemanların yerel rijitlik matrisi
Dönüşüm matrisi
Yapıların %90'ında, elemanların yerel rijitlik matrisi global koordinat sistemiyle örtüşmez. Yalnızca düz bir hat üzerinde hizalanmış basit kirişler, aynı Yerel Koordinat Sistemine (YKS) ve Global Koordinat Sistemine (GKS) sahiptir. Bizim durumumuzda, üçüncü eleman ikinci düğüm noktası etrafında 90 derece döndürülmüştür. Bu dönüşüm, ilerleyen hesaplamalar için gereklidir.

03) Dönüşüm matrisi eleman 1,2; Dönüşüm matrisi eleman 3
Global koordinat sistemine dönüşüm
Doğru deplasman hesabı için, dahil olan tüm elemanların koordinat sistemlerinin hizalanması şarttır. Bunu sağlamanın bir yolu, süreci basitleştiren ve deplasman hesabına sorunsuz bir geçiş sağlayan dönüşüm matrisinin kullanılmasıdır. Dönüşüm, yerel koordinat sistemi global koordinat sistemiyle aynı olan birinci ve ikinci elemanların matrisini değiştirmez. Ancak yaklaşık 90 derece döndürülmüş olan üçüncü elemanda bir değişiklik gözlemlenebilir. X ve Z ötelemelerine ait girişler değişmektedir. Matriste küçük sıfır dışı sayılar fark edebilirsiniz. Bunlar sayısal işlemden kaynaklanmaktadır; ancak genel rijitliğe göre görece küçük oldukları için sonuçları önemli ölçüde etkilemezler.
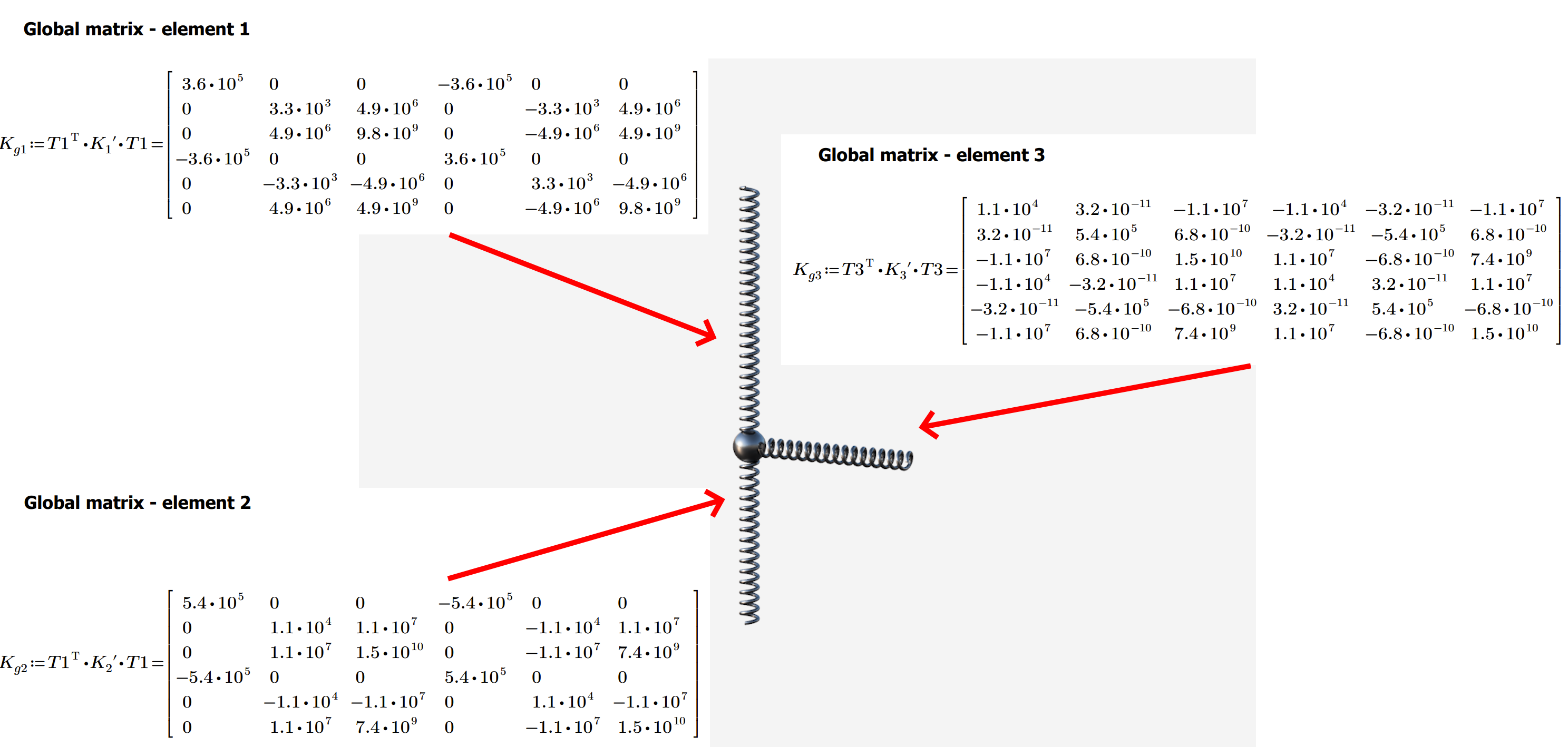
04) Global matris eleman 1,2; Global matris eleman 3
Global matris - toplama
Dört düğüm noktanız var ve her düğüm noktasının üç serbestlik derecesi bulunmaktadır. Bu, elde edilen matrisin boyutlarının 12x12 olduğu anlamına gelir. Sürecin kritik kısmı, bireysel matrislerden elde edilen sütun ve satırlardaki değerlerin global matrise eklenmesidir.
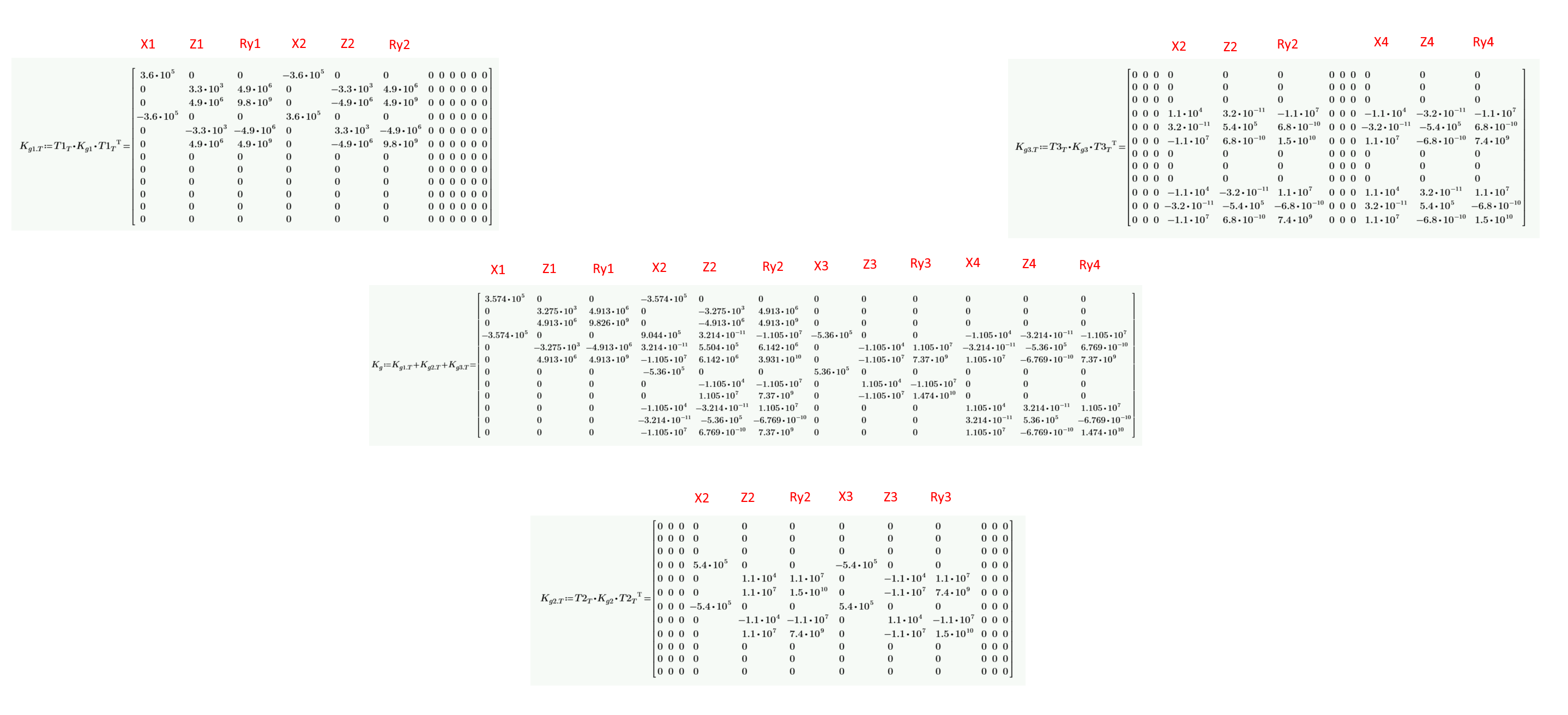
05) Tüm sistemin global rijitlik matrisi
Sınır koşulu ve yük vektörü
Sınır koşulları olmadan sistem belirsizdir (ve yalnızca önemsiz çözüm elde edilebilir). Bu senaryoda, birinci ve üçüncü düğüm noktalarında ankastre mesnetler dikkate alınmaktadır. Sıfır sınır deplasmanları (ve dönmeleri), karşılık gelen satır ve sütunların kaldırılmasıyla temsil edilebilir. Hiçbir kuvvet uygulanmadığında çözüm önemsizdir (sıfır deplasman). Örneğimizde, dördüncü düğüm noktasına 50 kN'luk düşey bir kuvvet uygulanmaktadır.

06) İndirgenmiş matris, yük vektörü ve uygulanan sınır koşulları
Çözüm
Küçük deformasyonlar ve doğrusal elastik malzeme göz önünde bulundurulduğunda, bilinmeyen deplasman vektörü tek adımda kolaylıkla çözülebilir. Bu yaklaşım hızlı ve son derece etkilidir; deplasman ile ilgili sorunların ele alınmasında kullanışlı bir yöntem haline getirir.
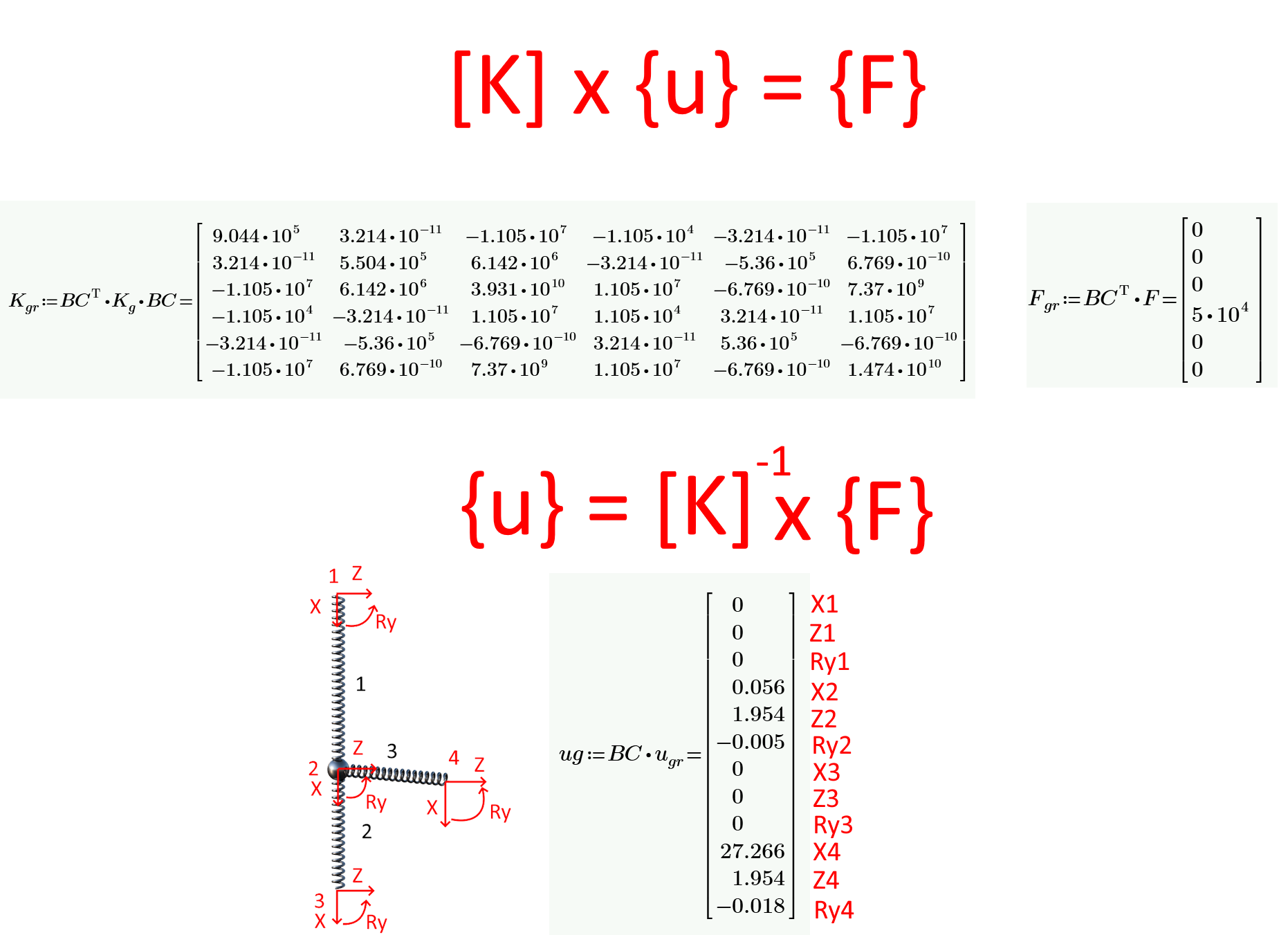
07) GKS'de düğüm noktası deplasmanı
SEA doğrulaması
Düğüm noktaları için sağlanan değerlerin kesin olduğu göz önüne alındığında, sonlu elemanlar analizi (SEA) çıktısının doğrudan rijitlik yaklaşımının (DRA) çıktısıyla tam olarak örtüşmesi zorunludur. Bu gereklilik, analitik sonuçların incelenen sistemin gerçek davranışıyla tutarlı olmasını sağlar. Bu nedenle, SEA ve DRA çıktılarının kabul edilebilir tolerans düzeyi içinde birbirleriyle eşleşmesini sağlamak kritik öneme sahiptir.
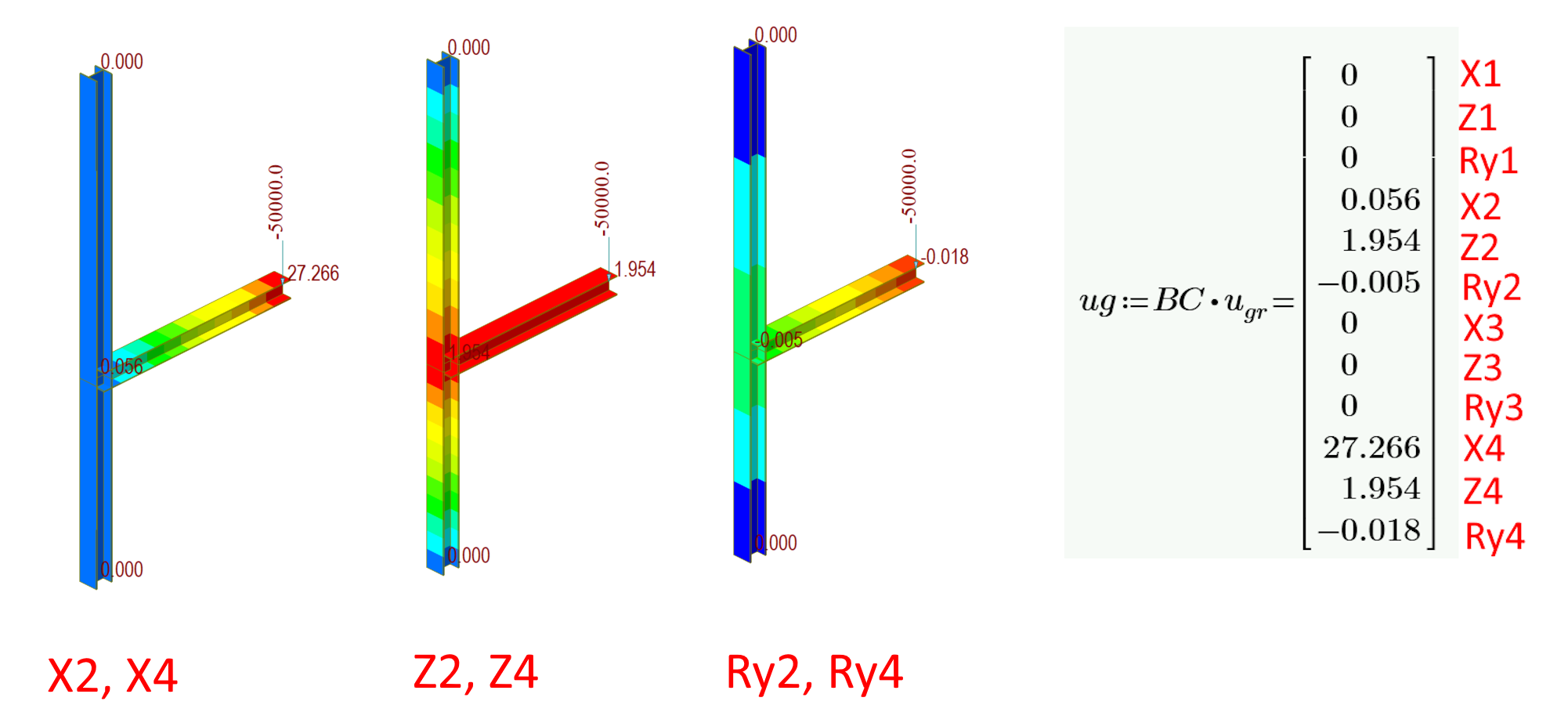
08) DRA ve SEA arasındaki düğüm noktası deplasmanının doğrulanması ve karşılaştırılması
Doğrudan rijitlik yaklaşımı – yarı rijit birleşimler
Birleşimlerin genellikle yarı rijit olduğunu ve tamamen rijit ya da mafsallı olmadığını anlamak kritik öneme sahiptir. Bir birleşimin rijitliğinin göz ardı edilmesi, modeldeki yapının davranışının gerçek yapının davranışından farklı olmasına yol açabilir. Rijitliğin hesaplamalarda nasıl dikkate alındığını ve yapının davranışını nasıl etkilediğini inceleyelim.
Dönme yayı ve sivil yapılar
Hangar ve çerçeveler gibi çelik sivil yapılar, kirişler tarafından verimli biçimde aktarılan eğilme yüklerine dayanacak şekilde tasarlanmıştır. Kiriş yüklendiğinde ve yapı hiperstatik olduğunda, birleşimin dönme rijitliği doğru yük yeniden dağılımının ve hassas deformasyonun sağlanmasında kritik bir rol oynar. Bu nedenle, yapıya olası hasarı önlemek için birleşimin yapısal bütünlüğünün korunması önemlidir.
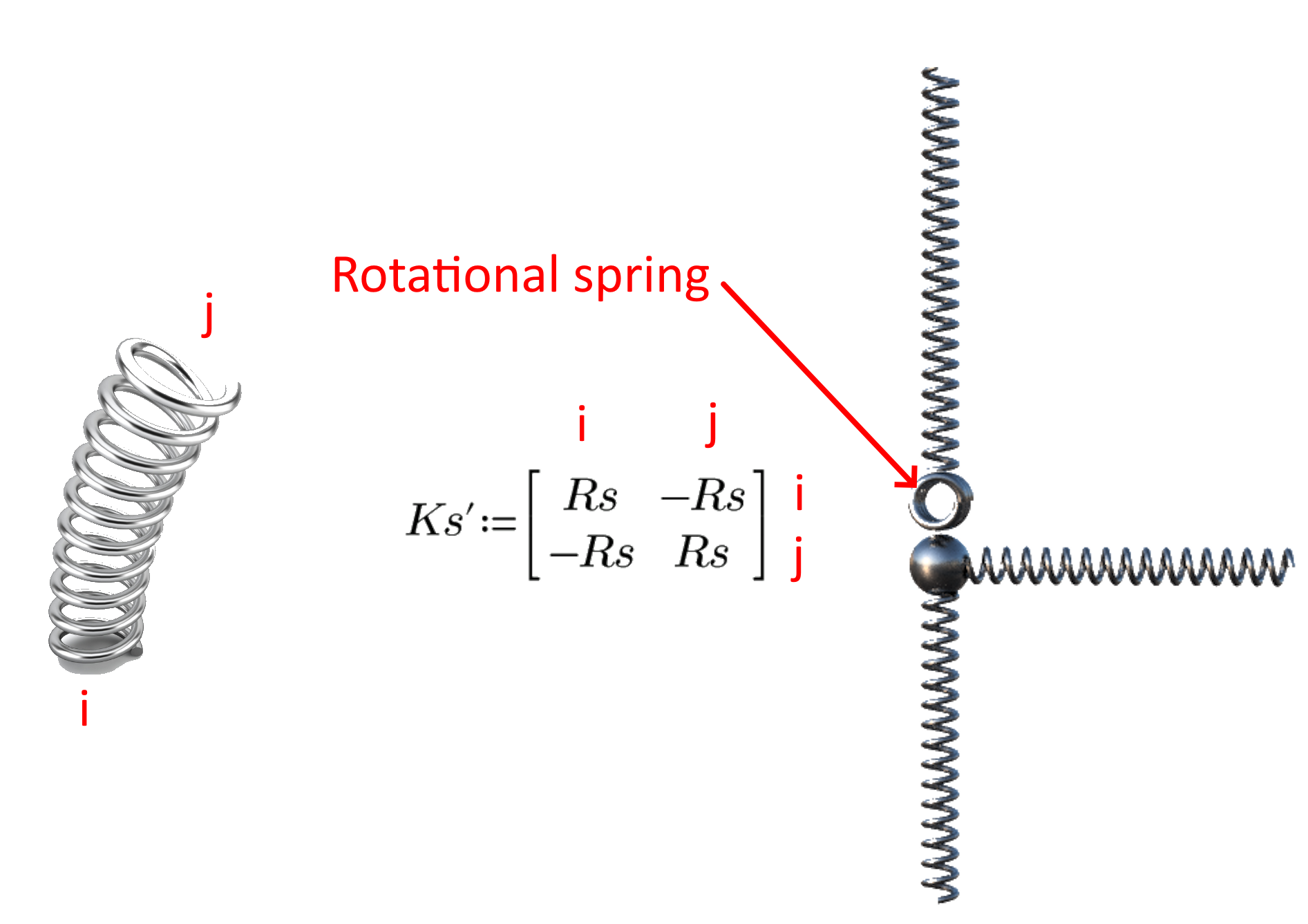
09) Dönme yayı - yerel matris
Bir birleşimde uyumluluğu sağlamak için deformasyonların birleştirilmesi önemlidir. Bu birleştirme, deformasyonların hesaplanması amacıyla global rijitlik matrisine dahil edilmelidir. Dönme rijitliği uygulandığında, diğer serbestlik dereceleri global rijitlik matrisine ek bir satır ve sütun olarak eklenmelidir. Bu tür bir birleşim için nihai matris 13x13 boyutunda olacakken, rijit bir birleşim matrisi 12x12 boyutunda olacaktır.
Dönme rijitliğinin etkisi
Bir yapının dönme rijitliği, kuvvetlerin nasıl dağıldığı ve deformasyonların nasıl oluştuğu üzerinde önemli bir etkiye sahiptir. Bu, dönme rijitliğine sahip bir yapının rijit veya mafsallı birleşimlere sahip bir yapıdan farklı davranacağı anlamına gelir. Rijitlik orantısız biçimde artırılırsa, yapının davranışında daha fazla değişikliklere yol açabilir. Bu senaryoda, artan dönme rijitliğinin etkilerini inceleyeceğiz. Üzerinde çalıştığımız model bir önceki bölümden alınmıştır ve dönme yayı birinci elemanın (j) ucuna bağlanmıştır.
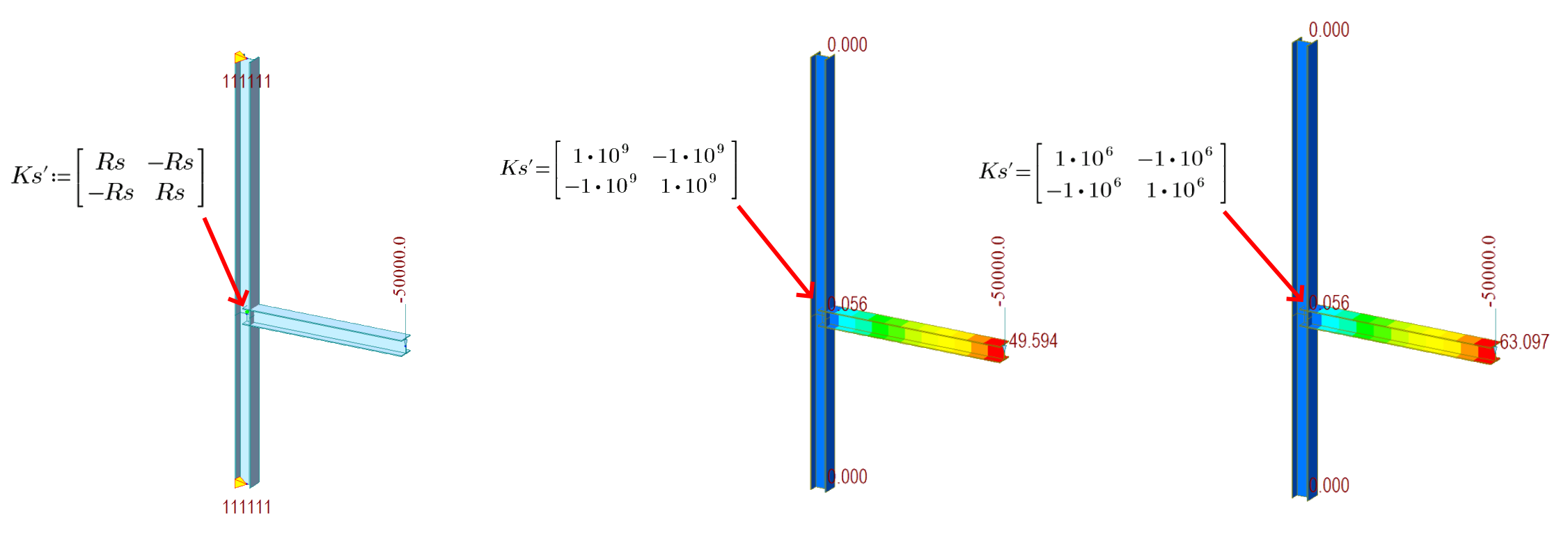
10) Farklı dönme rijitlikleri için deformasyonlar
Grafik, belirli rijitlik aralıklarında yarı rijit bir birleşim için deformasyonun çok doğrusal bir şekilde değiştiğini göstermektedir. Yarı rijit birleşimlerde rijitliğin olduğundan az veya fazla tahmin edilmesi, sehimlerde ve iç kuvvetlerin yeniden dağılımında önemli farklılıklara yol açar.
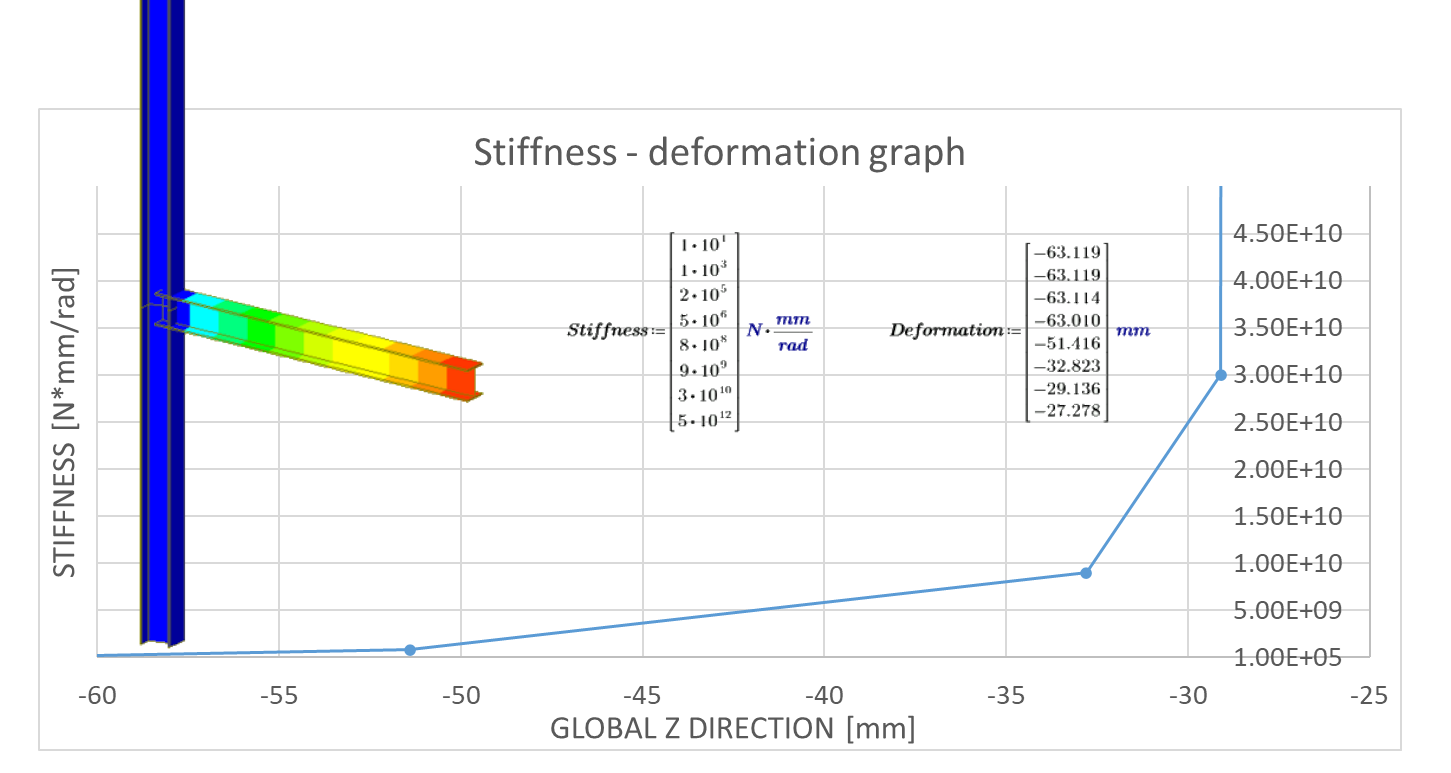
11) Rijitlik – deformasyon grafiği
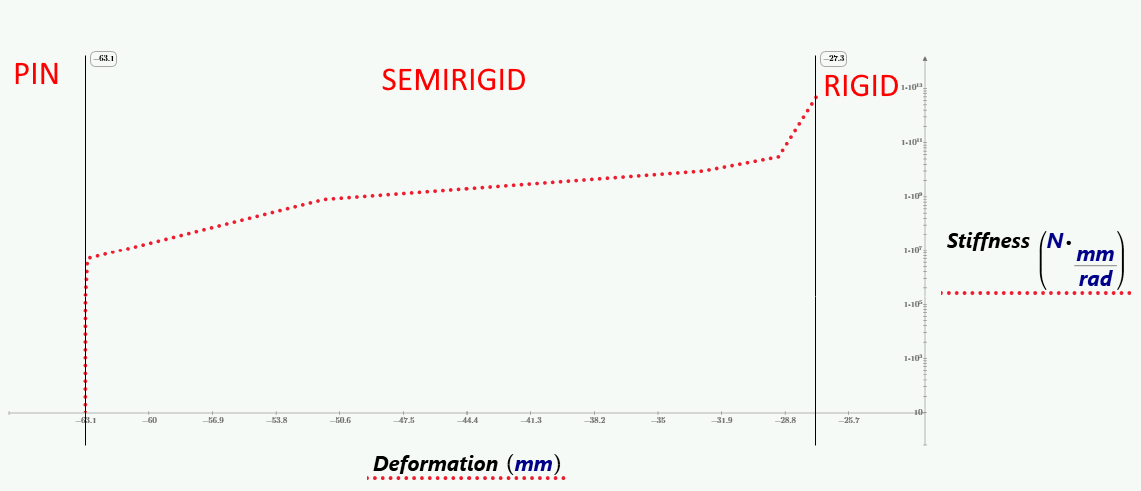
12) Birleşimler için rijitlik bölgesi
Sonuç ve yaklaşan konular
Yaklaşan çalışmamızın başarısını sağlamak için öncelikle ele alınan problemi derinlemesine anlamanız gerekmektedir. Ancak o zaman güven ve amaçla ilerleyebilirsiniz. Çalışmamız, incelediğimiz konuyla ilgili bir dizi önemli konuyu keşfetmeye adanmıştır. Dikkatli araştırma ve analiz yoluyla bu karmaşık ve zorlu probleme yeni bir ışık tutmayı ve nihayetinde bu önemli çalışma alanının daha iyi anlaşılmasına katkıda bulunmayı umuyoruz.
- IDEA StatiCa'da dönme rijitliği nasıl hesaplanır
- Bir SEA aracında birden fazla eleman için rijitlik nasıl kullanılır
- IDEA StatiCa ile ABAQUS arasında levha-levha birleşimi için dönme rijitliğinin doğrulanması
IDEA StatiCa'yı ücretsiz deneyin

