RISA-3D นำเข้าสู่ IDEA StatiCa
RISA-3D - การนำเข้าไฟล์ SAF ของ IDEA StatiCa
หมายเหตุ: การบูรณาการบนพื้นฐาน SAF นี้ได้รับการพัฒนาและดูแลโดย RISA โดย IDEA StatiCa ไม่มีส่วนเกี่ยวข้องในการดูแลการบูรณาการนี้ คำถามและข้อกำหนดทางเทคนิคทั้งหมดควรส่งตรงไปยัง RISA
เวิร์กโฟลว์:
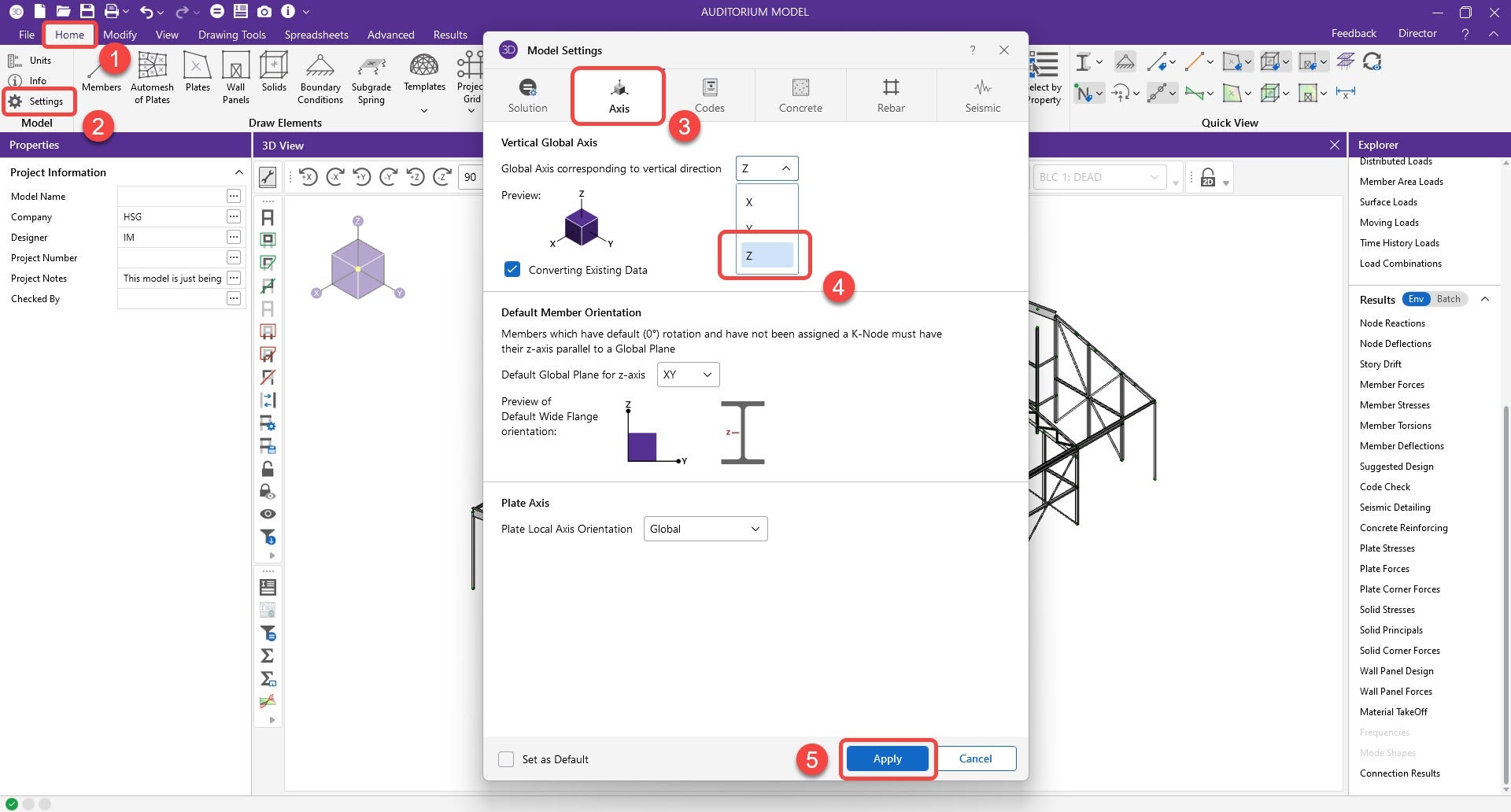
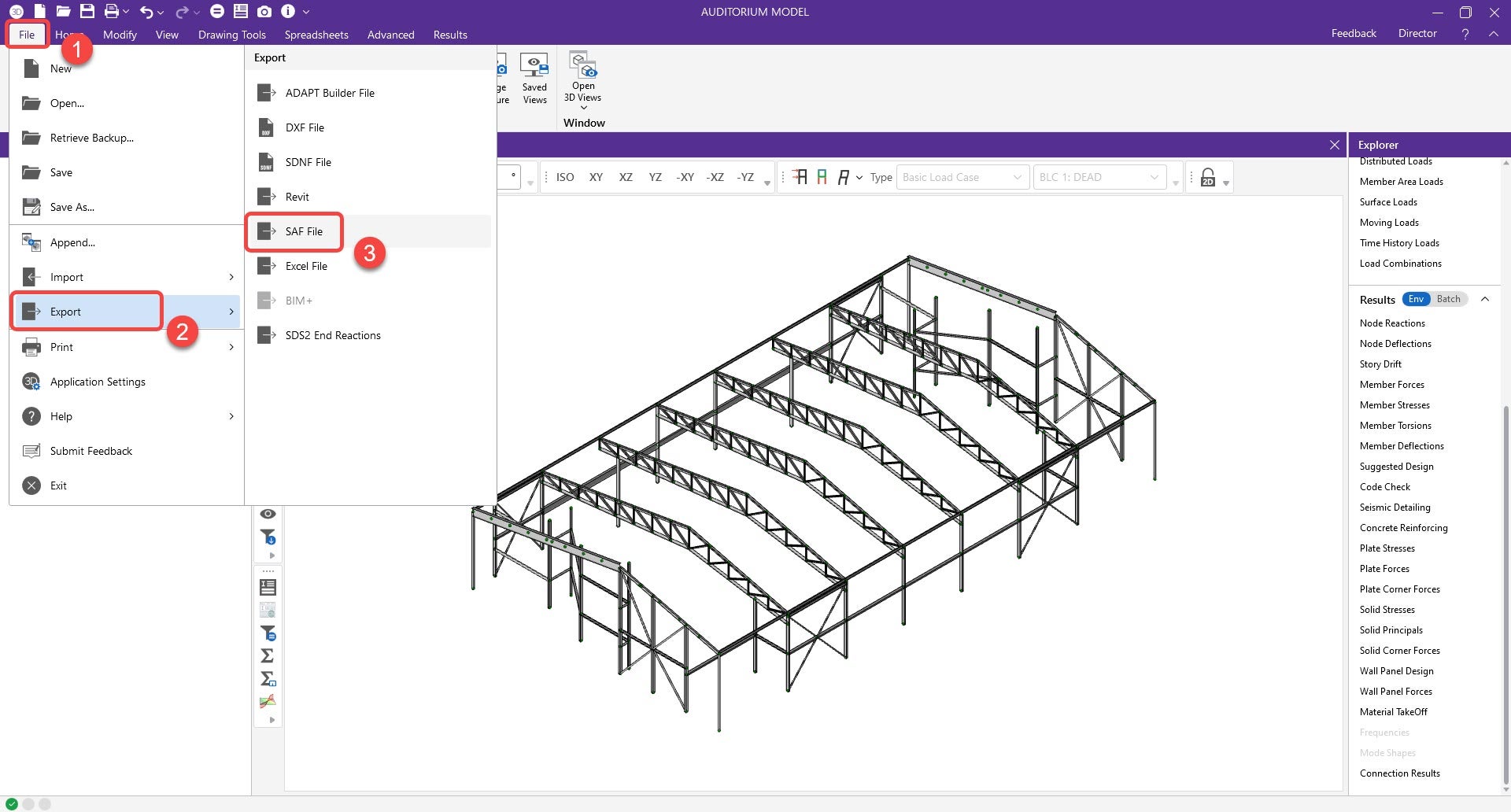
1. ผู้ใช้จะสร้างและบันทึกไฟล์ SAF จาก RISA ซึ่งสามารถพบตัวเลือกนี้ได้ในตัวเลือกการส่งออก อย่างไรก็ตาม RISA จะแสดงข้อความแจ้งว่าแกนแนวตั้งสากล (Global vertical axis) จำเป็นต้องเปลี่ยนจาก Y เป็น Z ก่อนการส่งออก การอัปเดตนี้จะเปลี่ยนเฉพาะระบบพิกัดสากล (GCS) เท่านั้น ไม่ใช่ระบบพิกัดท้องถิ่น (LCS)
หมายเหตุ: การเปลี่ยน GCS จาก Y เป็น Z อาจส่งผลต่อทิศทางของแรงกระทำ เช่น แรงกระทำต่อพื้นที่ผิวของชิ้นส่วน คุณสามารถบันทึกไฟล์ RISA อีกชุดหนึ่ง โดยชุดหนึ่งสำหรับการปรับ GCS และอีกชุดสำหรับการวิเคราะห์และผลลัพธ์
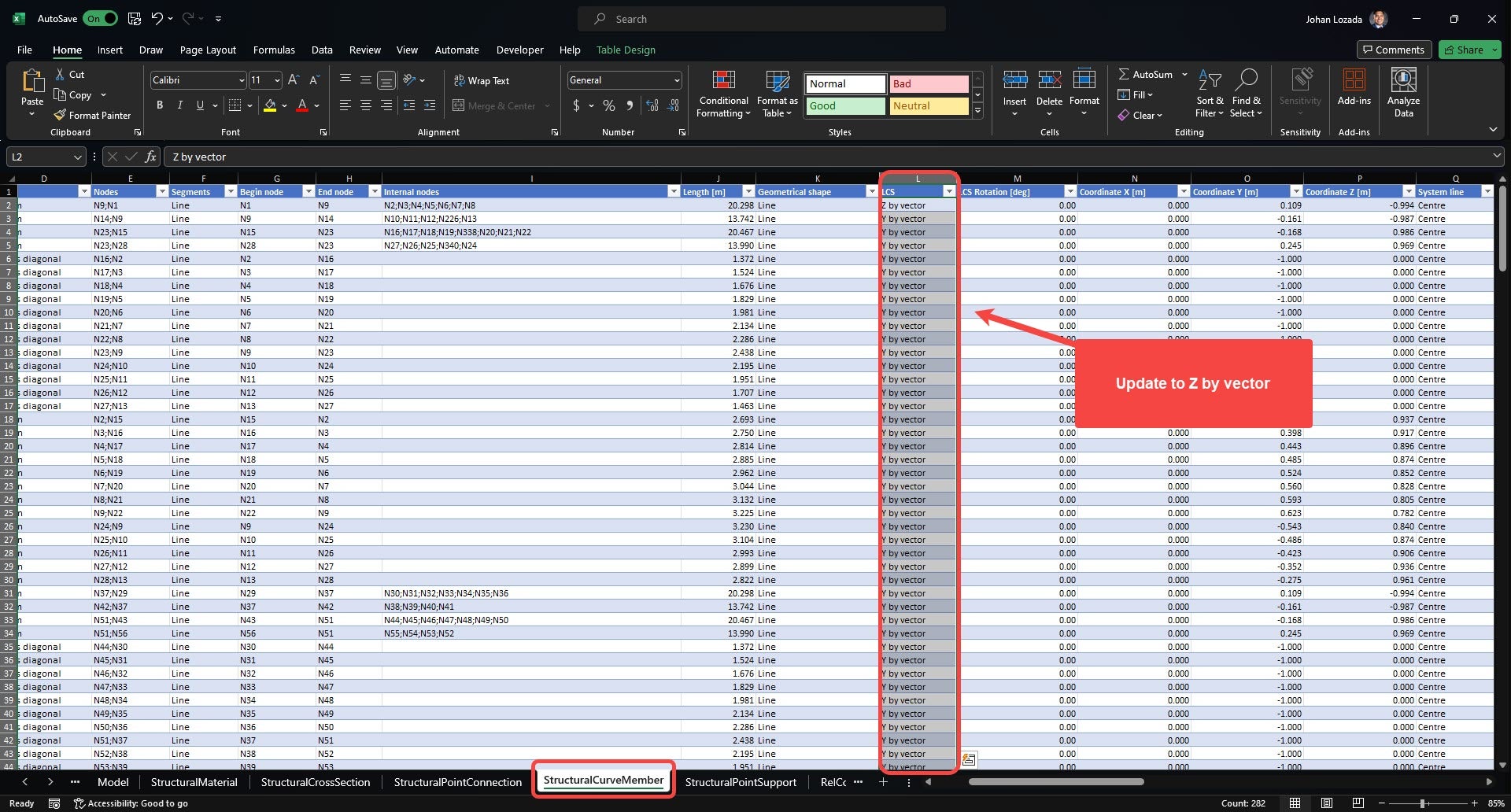
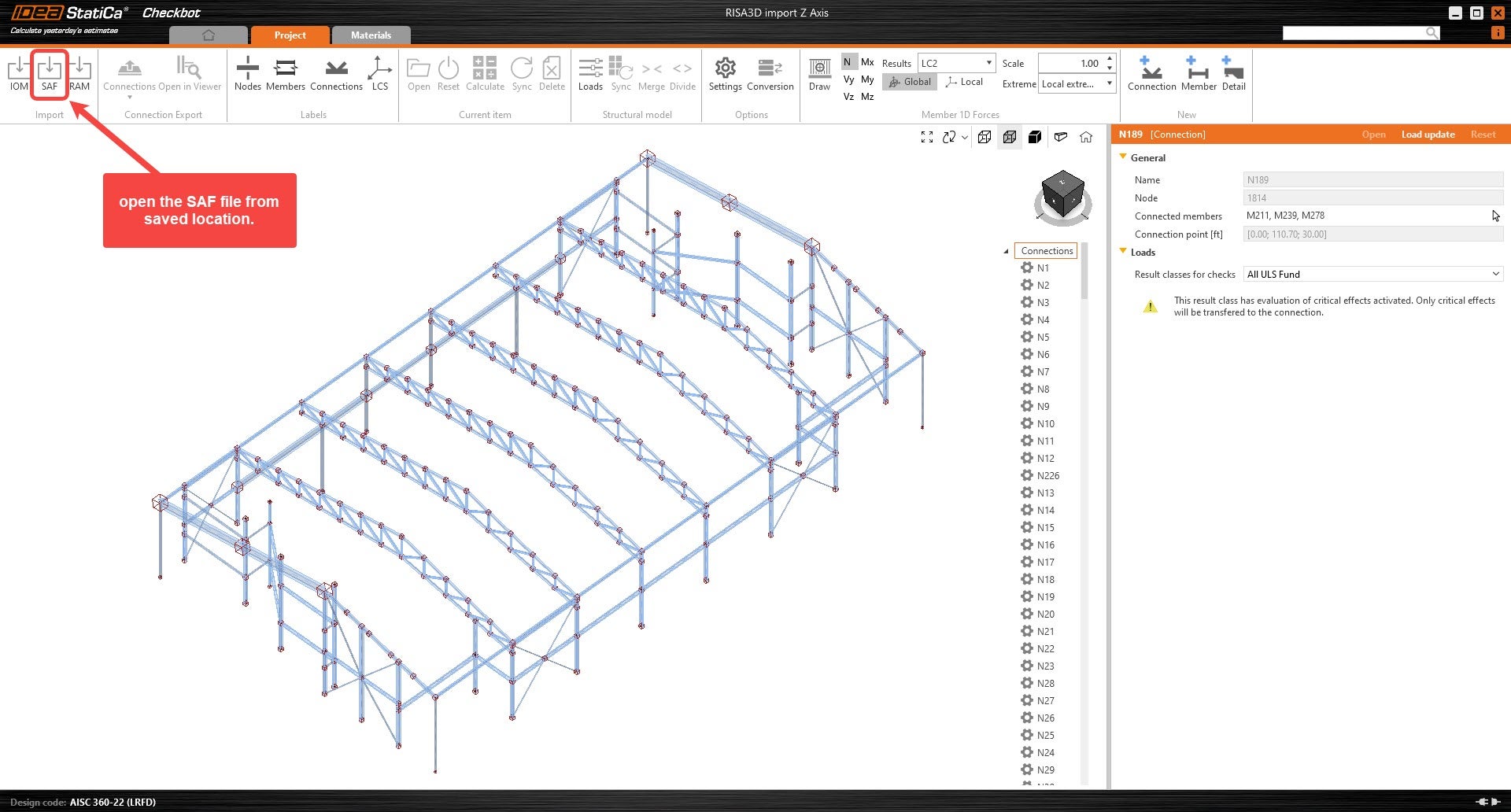
2. เปิดไฟล์ SAF ก่อนนำเข้าใน Checkbot และไปที่ชีต "StructuralCurveMember"
- เปลี่ยนคอลัมน์ L (LCS) จาก "Y by Vector" เป็น "Z by vector" ในชิ้นส่วนทั้งหมด
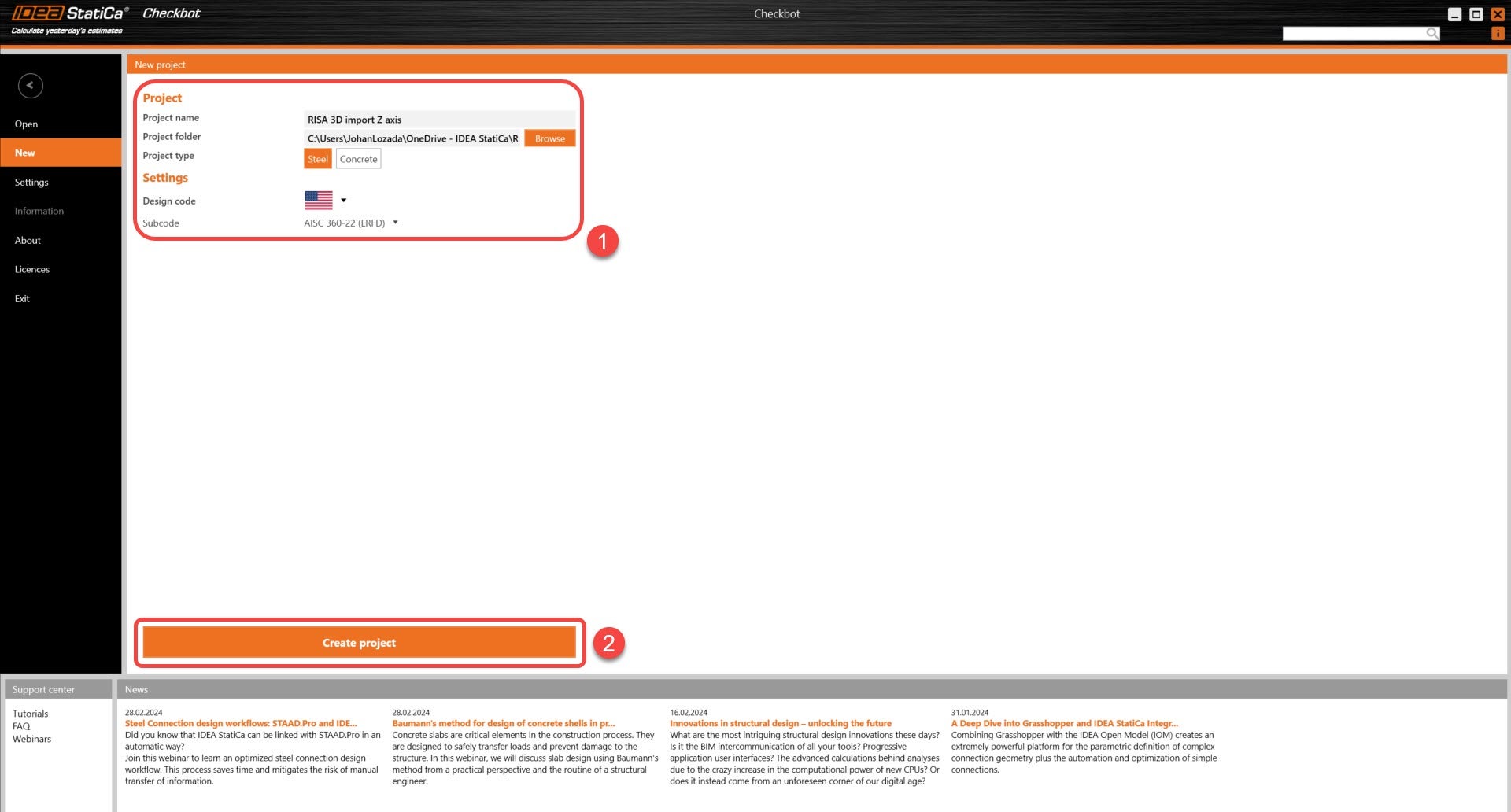
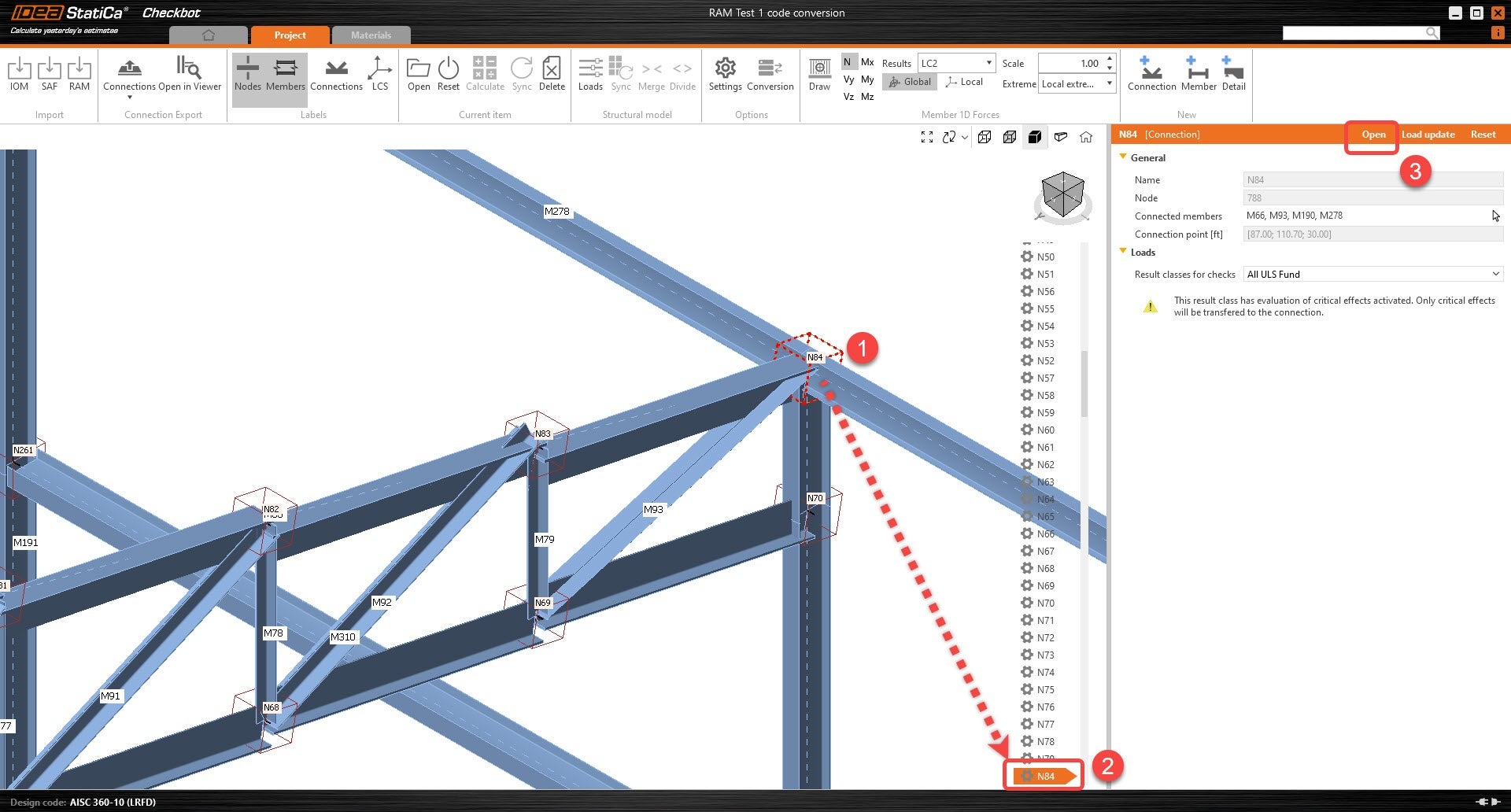
3. สร้างโปรเจกต์ Checkbot ใหม่
4. นำเข้าแบบจำลองเข้าสู่โปรเจกต์ IDEA Checkbot ใหม่
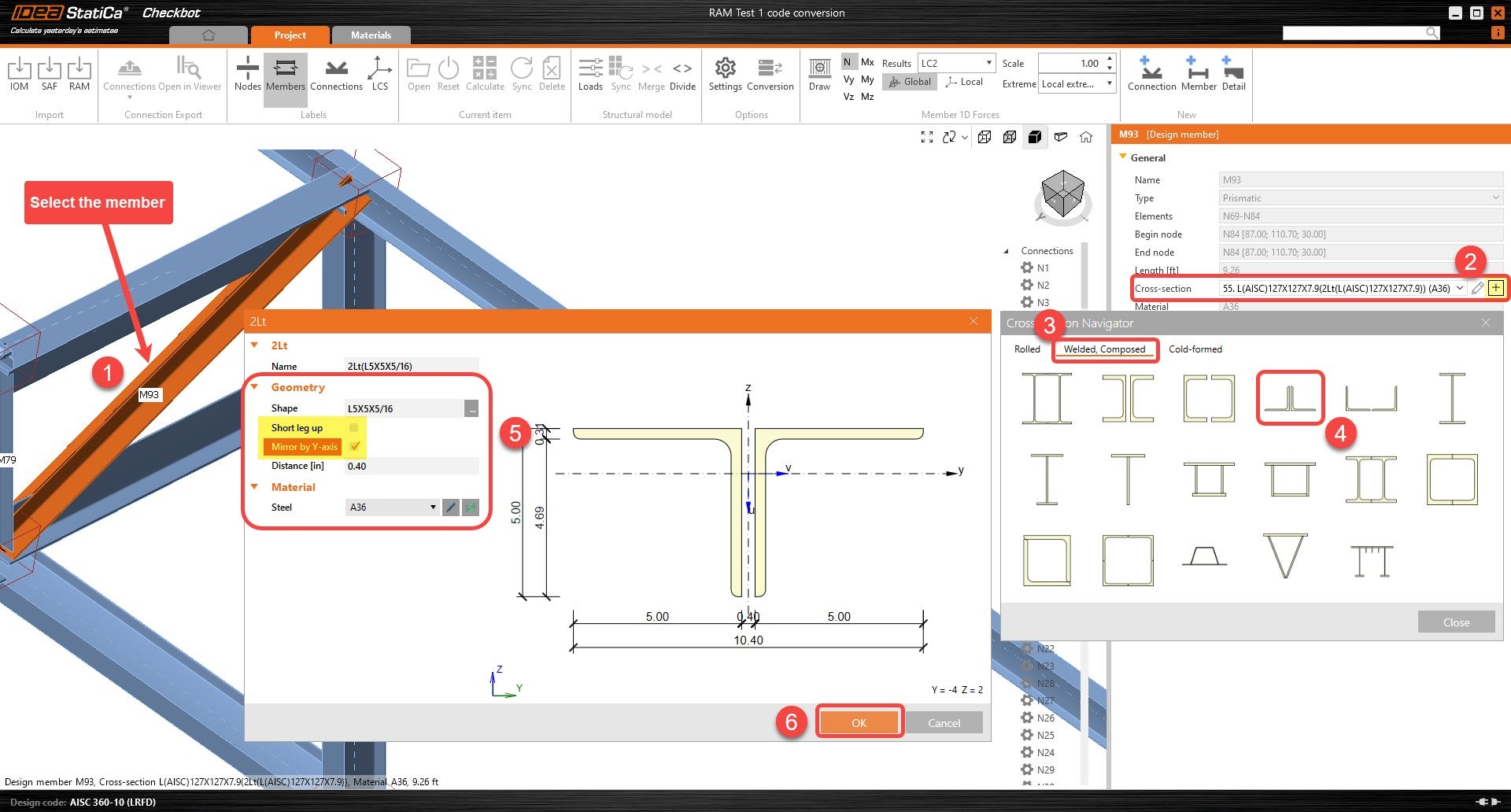
5. หน้าตัดสมมาตรทั้งหมดจะถูกหมุนตามที่กำหนด สำหรับชิ้นส่วนที่ไม่สมมาตรซึ่งไม่ได้หมุนอย่างถูกต้อง ให้ทำตามขั้นตอนถัดไป
การปรับชิ้นส่วนที่ไม่สมมาตรให้มีการหมุนที่ถูกต้อง
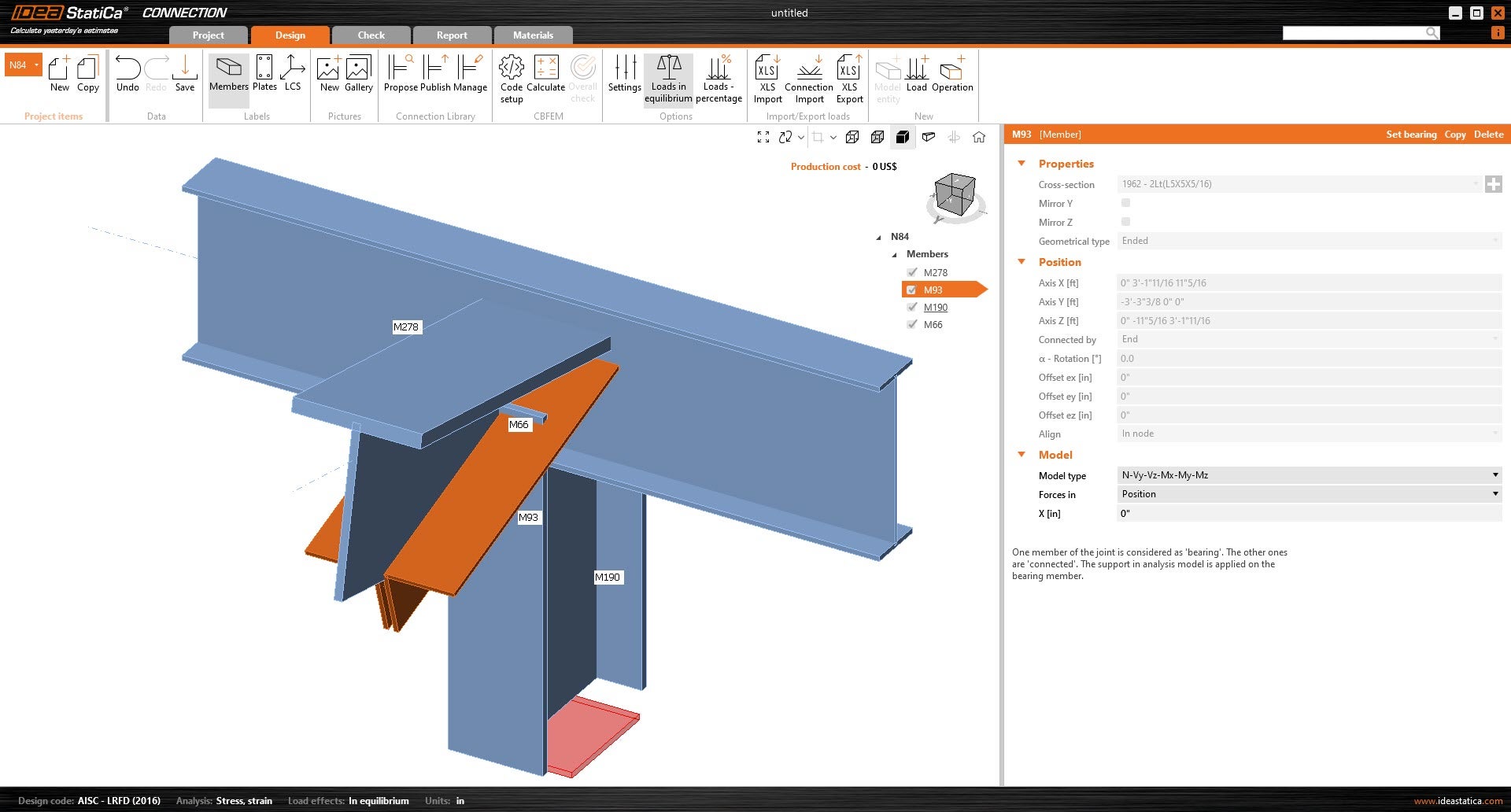
6. เลือกชิ้นส่วนที่มีการหมุนไม่ถูกต้อง ภายใต้พารามิเตอร์ของชิ้นส่วน คลิกที่ไอคอน "+" เพื่อสร้างหน้าตัดใหม่ หน้าตัดใหม่จะช่วยให้ผู้ใช้สามารถสะท้อนรูปทรงเรขาคณิตของหน้าตัดตามแกน Y หรือแกน Z ก่อนนำไปใช้กับชิ้นส่วน
- ขณะนี้คุณสามารถเลือกชิ้นส่วนหลายชิ้นพร้อมกันเพื่อปรับหลายชิ้นในคราวเดียว
7. เมื่อชิ้นส่วนของการเชื่อมต่อถูกหมุนอย่างถูกต้องแล้ว ผู้ใช้สามารถเปิด Connection และเริ่มสร้างแบบจำลองได้
แม่แบบ Excel สำหรับการนำเข้าแรงกระทำ
(ใช้แม่แบบนี้กับ Checkbot เท่านั้น)
หมายเหตุ: การบูรณาการบนพื้นฐาน SAF ได้รับการพัฒนาและดูแลโดย RISA โดย IDEA StatiCa ไม่มีส่วนเกี่ยวข้องในการดูแลการบูรณาการนี้ คำถามและข้อกำหนดทางเทคนิคทั้งหมดควรส่งตรงไปยัง RISA
ลิงก์ต่อไปนี้ประกอบด้วยเครื่องมือนำเข้าแรงกระทำ:
เครื่องมือนำเข้าแรงกระทำ RISA-IDEA
เวิร์กโฟลว์:
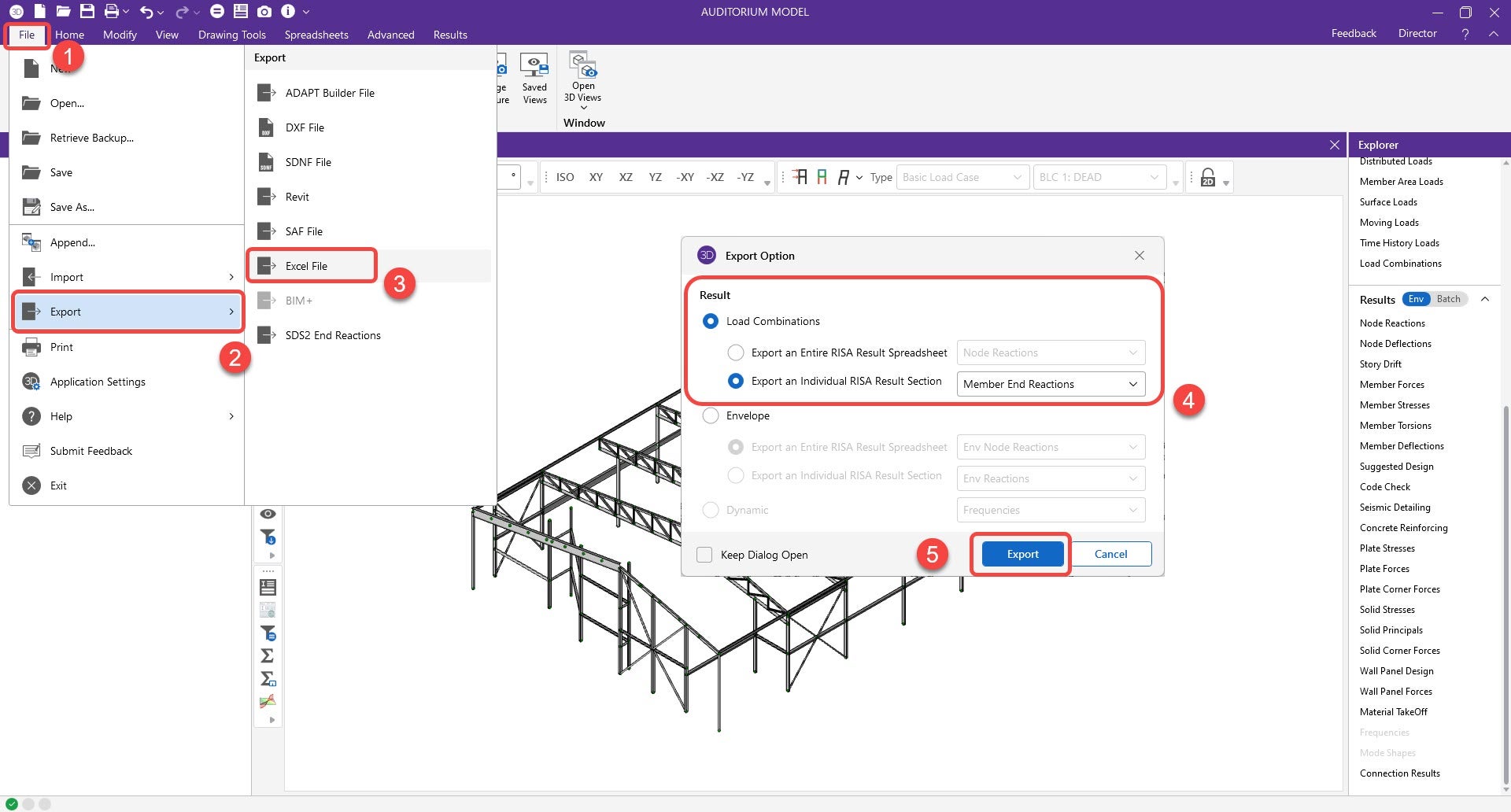
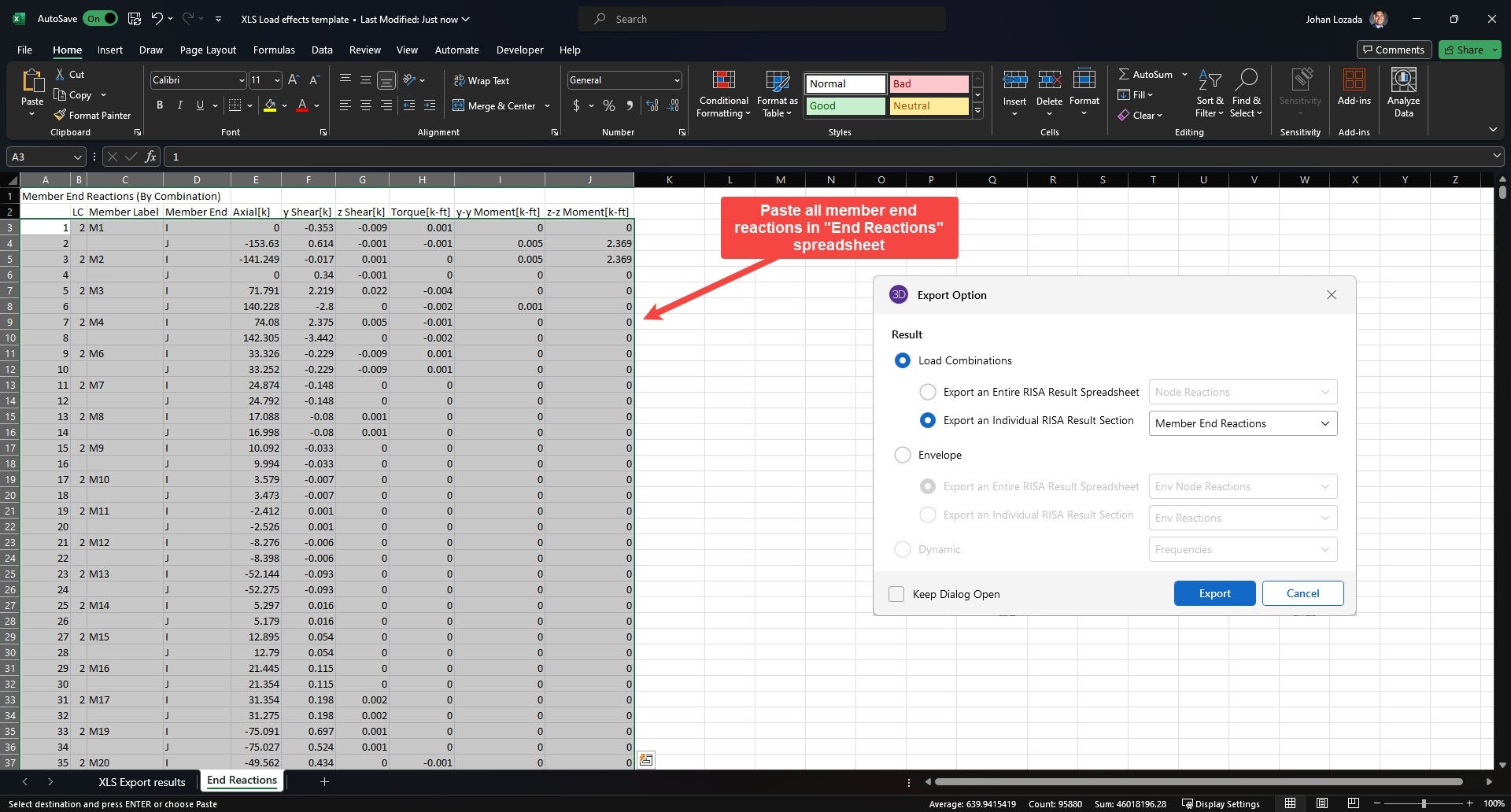
1. ส่งออกและบันทึกผลลัพธ์แรงกระทำจาก RISA ตรวจสอบให้แน่ใจว่าผลลัพธ์ของการรวมแรงกระทำสำหรับแรงปฏิกิริยาที่ปลายชิ้นส่วนได้รับการส่งออกแล้ว
- File --> Export --> Excel file --> Load combinations --> Export an individual RISA Result Section --> Member End Reactions
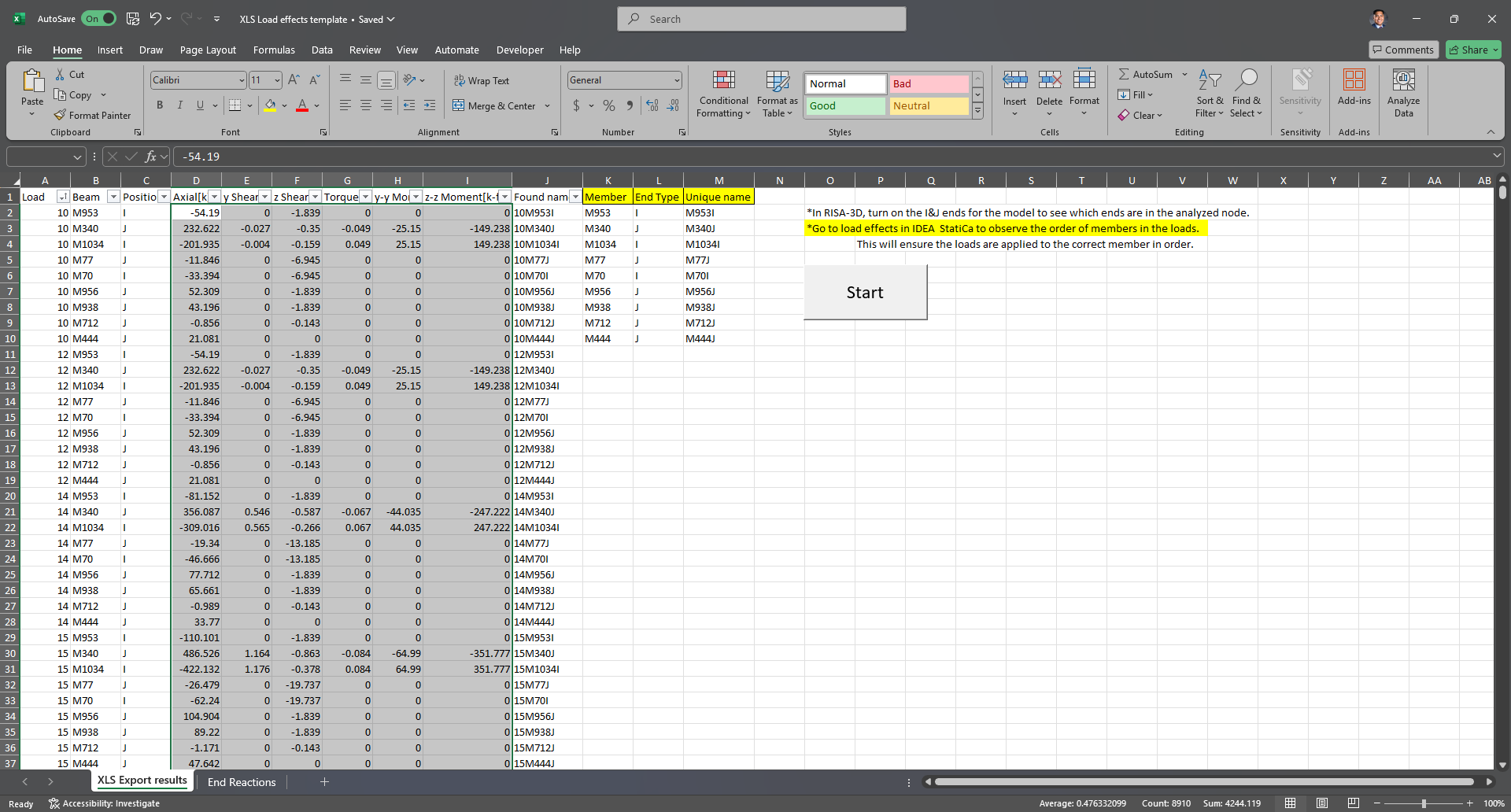
2. เปิดไฟล์ Excel เลือกและคัดลอกข้อมูลแรงในชิ้นส่วนทั้งหมดจากคอลัมน์ A-J
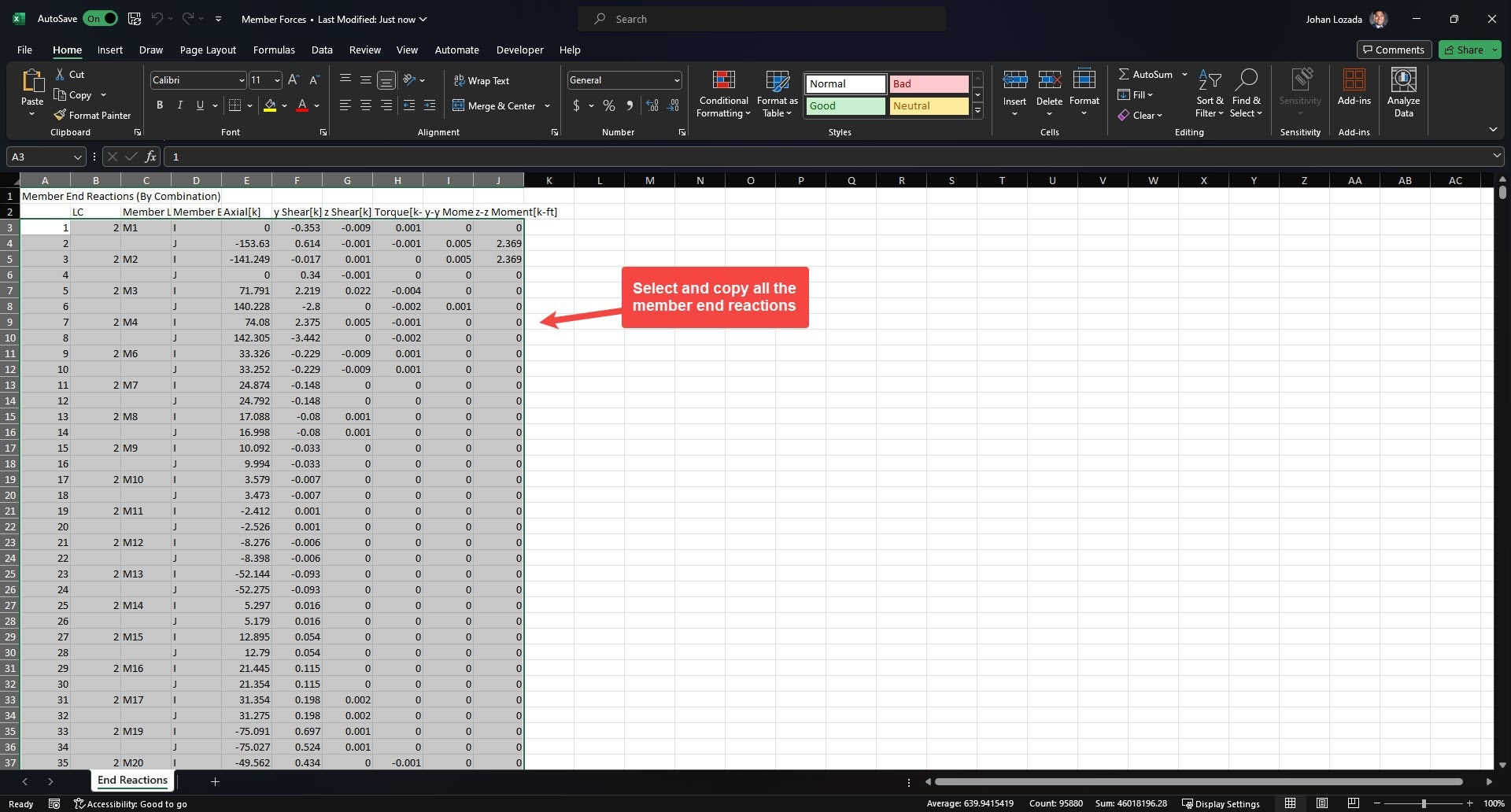
3. วางข้อมูลที่คัดลอกลงในสเปรดชีต "End Reactions" ของแม่แบบ Excel
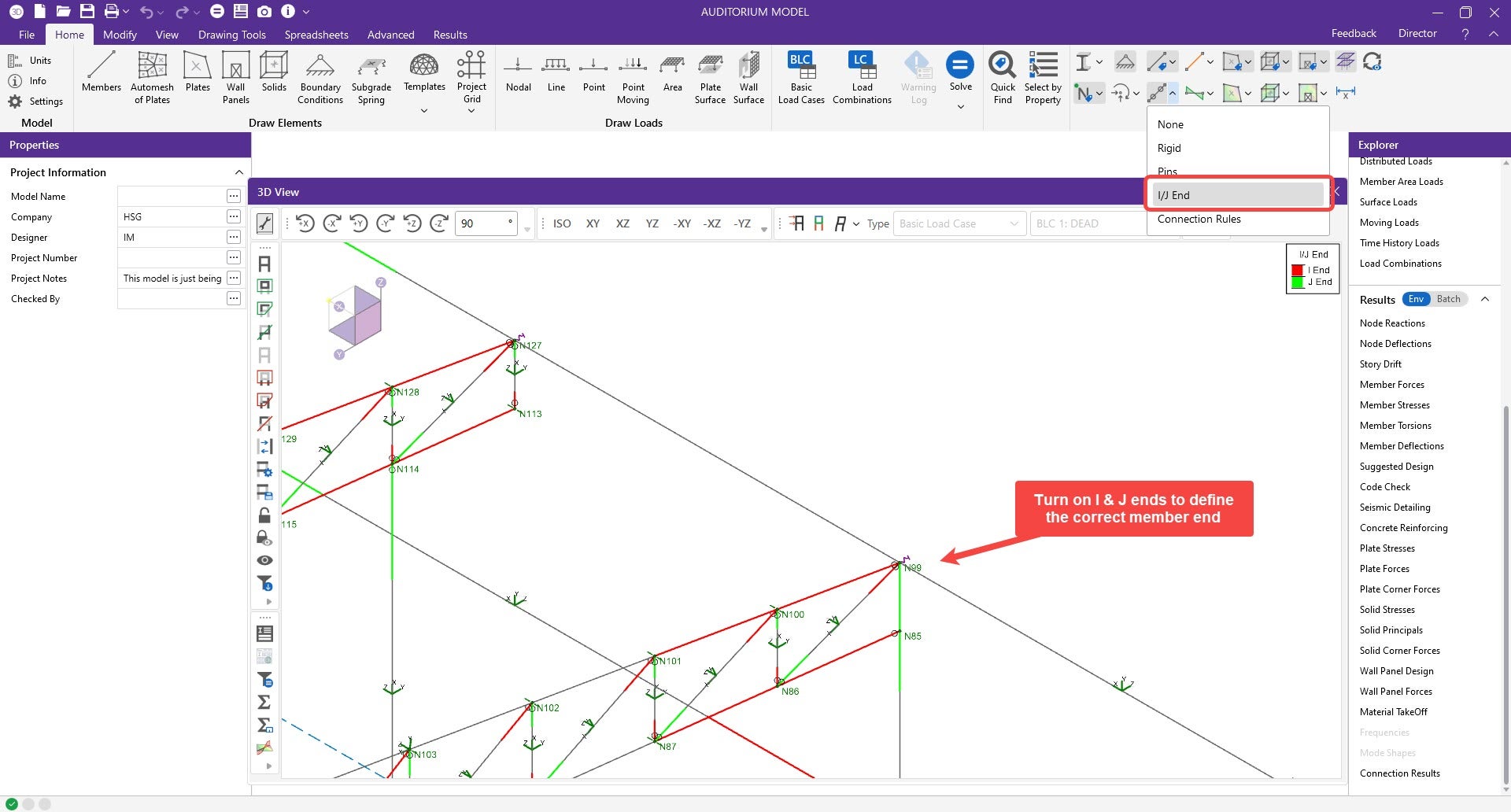
4. ภายใต้ XLS Export results ให้ป้อนชิ้นส่วนที่วิเคราะห์ในการเชื่อมต่อ พร้อมกับประเภทปลาย (ปลาย I หรือ J) ที่สอดคล้องกัน ตรวจสอบให้แน่ใจว่าลำดับของชิ้นส่วนเหมือนกับลำดับของผลของแรงกระทำใน IDEA ปลาย I และ J ควรตรงกับที่กำหนดใน RISA-3D ด้วย
หมายเหตุ: ป้ายกำกับปลายชิ้นส่วนของ IDEA StatiCa จะตรงข้ามกัน คือ "End" -> ปลาย I, "Begin" -> ปลาย J
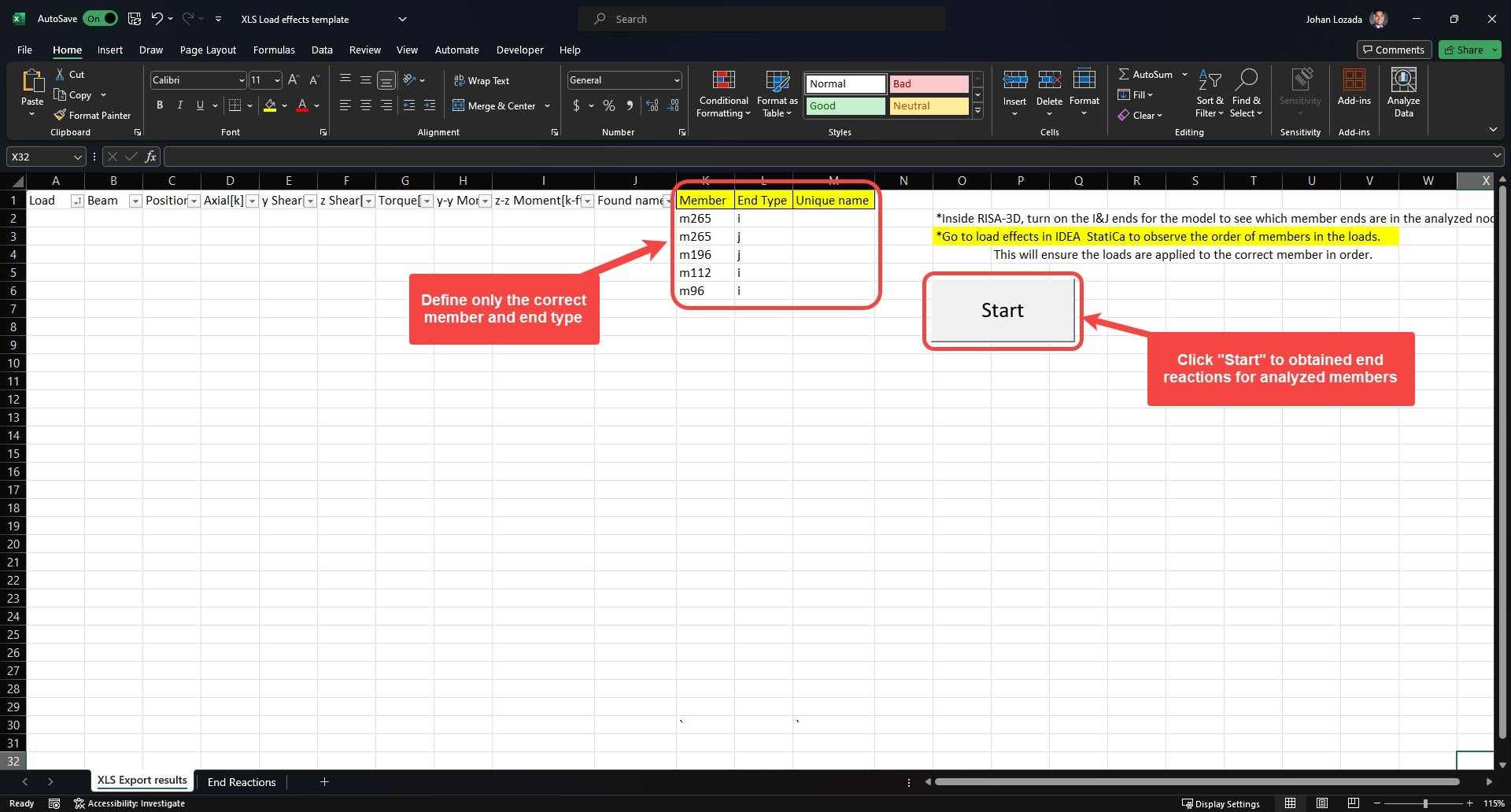
5. คลิก "start" เพื่อให้ Excel แปลงแรงกระทำสำหรับการนำเข้าสู่ IDEA เลือกผลของแรงกระทำทั้งหมดจากคอลัมน์ D-I และคัดลอก (คุณสามารถคัดลอกแรงกระทำทั้งหมดพร้อมกันได้)
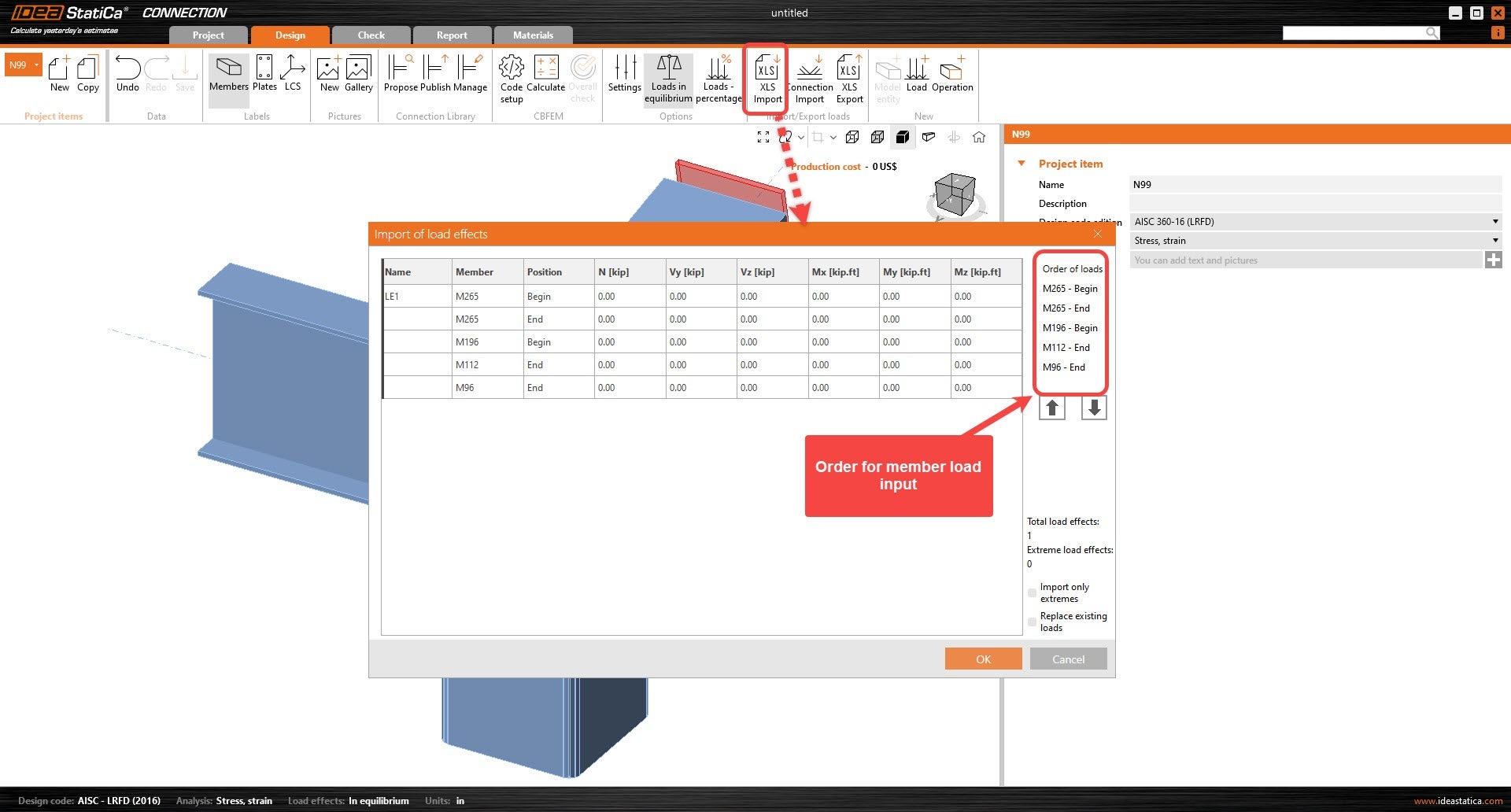
6. ใน IDEA ภายใต้ Import/Export loads ให้เลือก XLS Import หน้าต่าง Import of load effects จะปรากฏขึ้น คลิกใต้ชื่อผลของแรงกระทำที่มีอยู่ ซึ่งควรเป็นเซลล์แรกใต้คอลัมน์ "Name" วางผลของแรงกระทำที่คัดลอกไว้ด้วย Ctrl+V
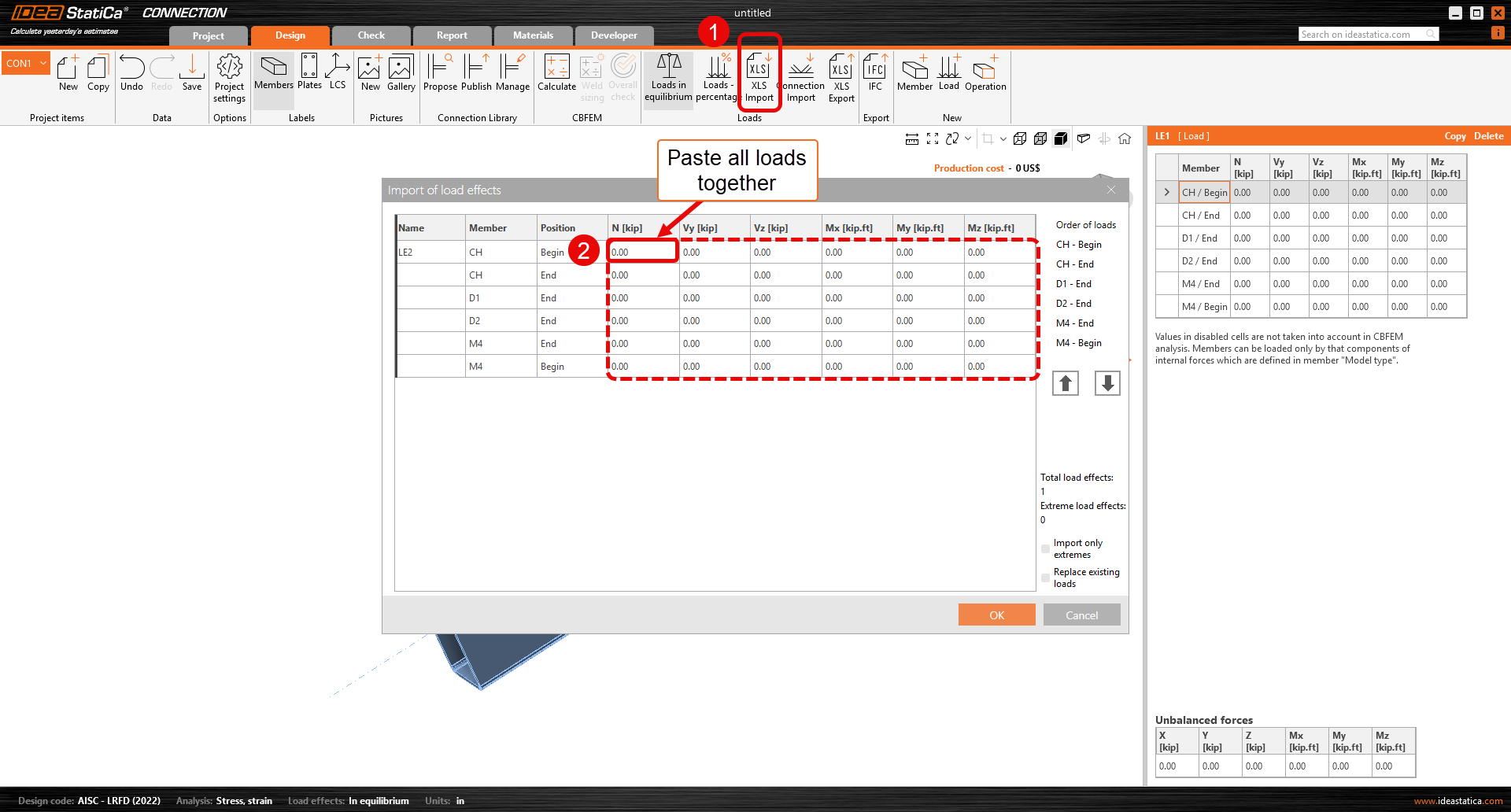
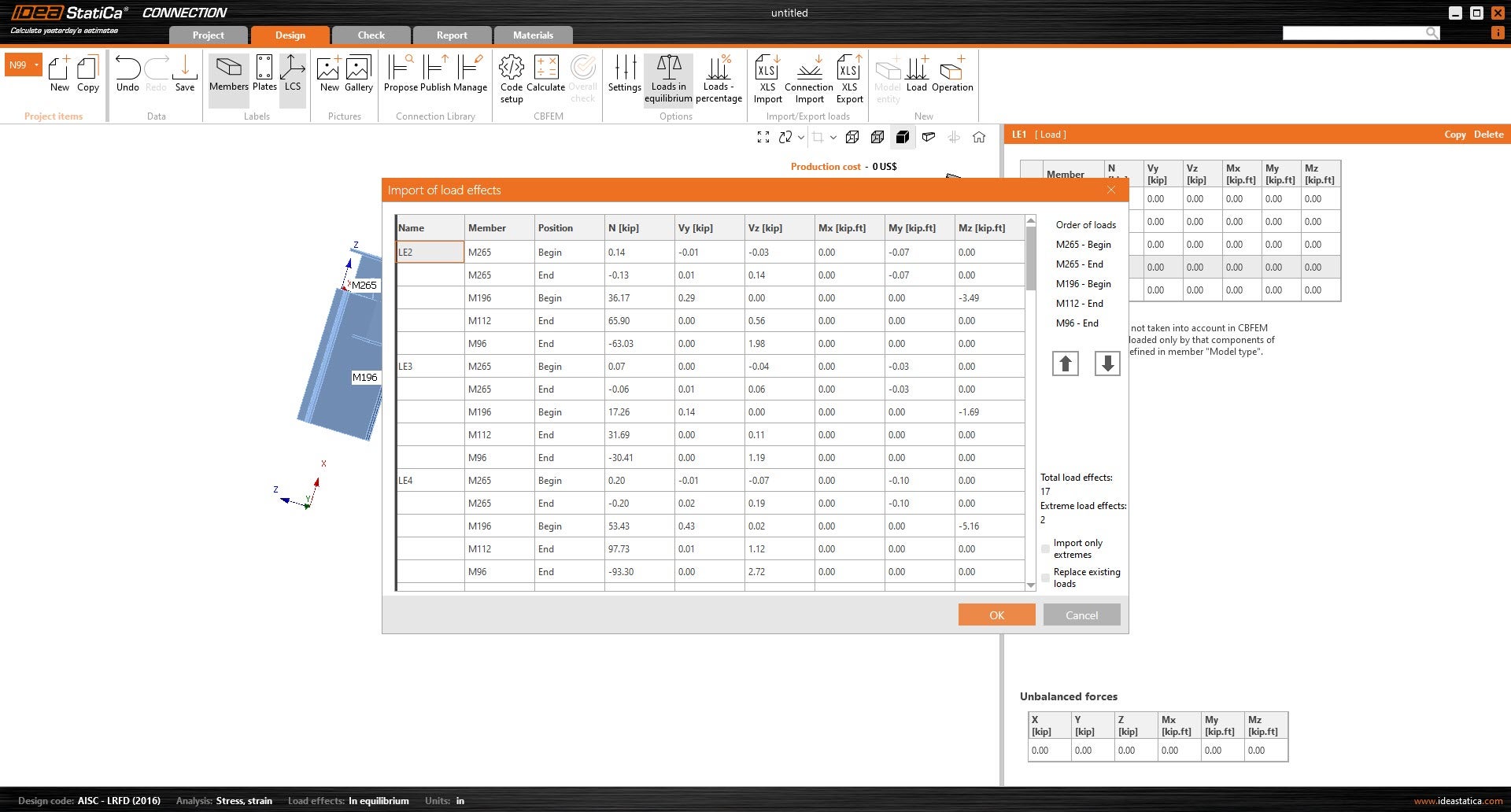
7. คลิก OK เพื่อให้แรงกระทำถูกนำไปใช้กับการเชื่อมต่อ
คำอธิบายความแตกต่างของ LCS และแรงในชิ้นส่วน
เมื่อทำงานกับซอฟต์แวร์วิเคราะห์และออกแบบโครงสร้าง การทำความเข้าใจวิธีการกำหนดระบบพิกัดท้องถิ่น (LCS) มีความสำคัญ โดยเฉพาะอย่างยิ่งเมื่อถ่ายโอนแรงที่ปลายชิ้นส่วนระหว่างโปรแกรม
ในส่วนนี้ เราจะเปรียบเทียบ RISA-3D ซึ่งเป็นซอฟต์แวร์วิเคราะห์สากล กับ IDEA StatiCa แม้ว่าซอฟต์แวร์ทั้งสองจะใช้ระบบพิกัดท้องถิ่นในการกำหนดทิศทางของชิ้นส่วน แต่มีความแตกต่างบางประการที่ต้องให้ความสนใจเพื่อให้การถ่ายโอนแรงมีความถูกต้อง ด้านล่างนี้เราจะพิจารณานิยาม LCS ในซอฟต์แวร์แต่ละตัวเพื่อช่วยให้คุณจัดการความแตกต่างเหล่านี้และรักษาความถูกต้อง
ระบบพิกัดท้องถิ่นของ RISA-3D:
- แกน X: ตามความยาวของชิ้นส่วน
- แกน Y: แนวตั้งในระนาบของหน้าตัด
- แกน Z: ตั้งฉากกับทั้งแกน X และแกน Y แนวนอนในระนาบของหน้าตัด
ระบบพิกัดท้องถิ่นของ IDEA StatiCa:
- แกน X: ตามความยาวของชิ้นส่วน
- แกน Y: ตั้งฉากกับทั้งแกน X และแกน Z แนวนอนในระนาบของหน้าตัด
- แกน Z: แนวตั้งในระนาบของหน้าตัด
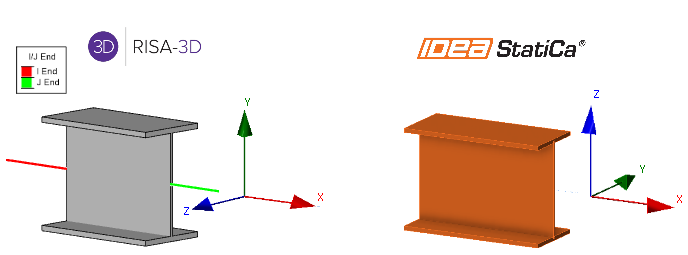
ความแตกต่างที่สำคัญระหว่างระบบพิกัดท้องถิ่น (LCS) ของ RISA-3D และ IDEA StatiCa อยู่ที่วิธีการกำหนดแกน Y และแกน Z
ใน RISA-3D แกน Y เป็นแนวตั้งภายในระนาบของหน้าตัด ในขณะที่แกน Z เป็นแนวนอน อย่างไรก็ตาม ใน IDEA StatiCa สิ่งนี้จะกลับกัน คือ แกน Z เป็นแนวตั้ง และแกน Y เป็นแนวนอน แกน X ยังคงสอดคล้องกันในทั้งสองโปรแกรม โดยวิ่งตามความยาวของชิ้นส่วน
ความแตกต่างในทิศทางของแกนมีความสำคัญที่ต้องรับรู้เมื่อถ่ายโอนแรงที่ปลายระหว่างสองโปรแกรม เนื่องจากส่งผลโดยตรงต่อการตีความทิศทางของแรง
แรงในชิ้นส่วนของ RISA-3D:
แผนภาพนี้แสดงตำแหน่งหน้าตัดของชิ้นส่วนพร้อมแรงหน้าตัดบวกทั้งหมดใน RISA-3D ผลลัพธ์แรงในชิ้นส่วนเป็นไปตามกฎมือขวาสำหรับจุดต่อ ซึ่งสอดคล้องกับ IDEA StatiCa อย่างไรก็ตาม แรงหน้าตัดของ RISA ที่แสดงสำหรับตำแหน่งใดๆ ตามความยาวชิ้นส่วนแสดงถึงแรงที่กระทำบนด้านซ้ายของหน้าตัดนั้น
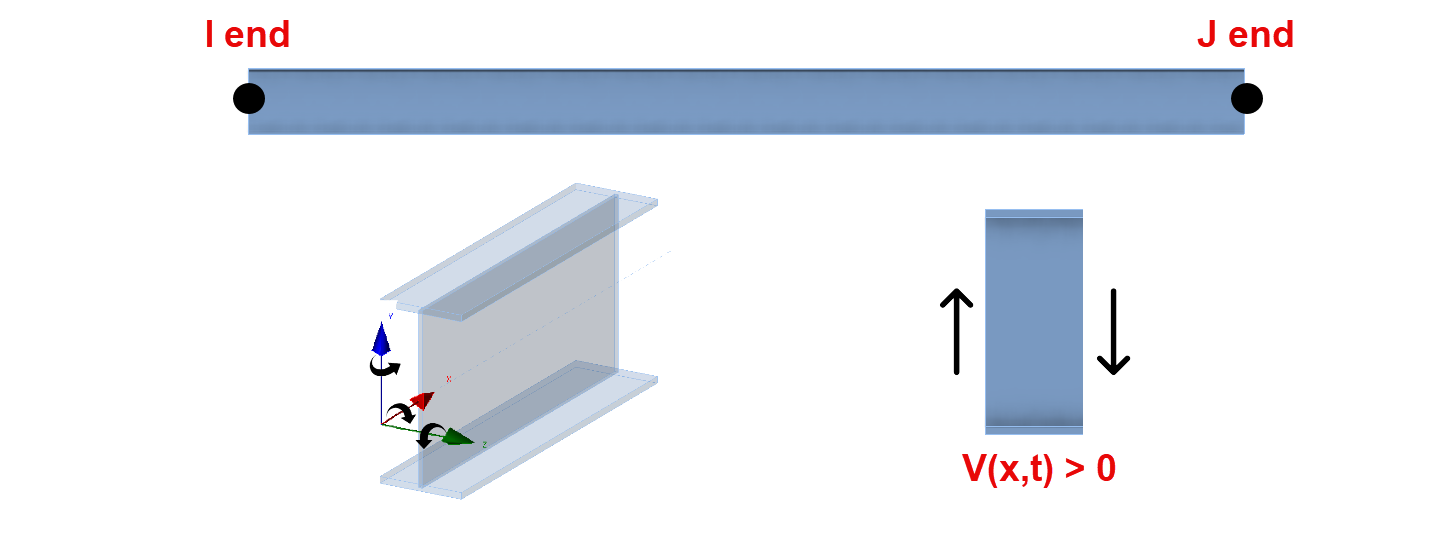
- สำหรับแรงตามแนวแกน แรงอัดเป็นบวก
- สำหรับโมเมนต์ ทวนเข็มนาฬิกาตามแนวแกนชิ้นส่วนเป็นบวก
- แรงเฉือนเป็นบวกเมื่อแผนภาพวัตถุอิสระทำให้ชิ้นส่วนหมุนตามเข็มนาฬิกา (โดยมีปลาย I อยู่ทางซ้ายและปลาย J อยู่ทางขวา)
- ความช่วยเหลือออนไลน์ของ RISA มีคำอธิบายฉบับสมบูรณ์สำหรับผลลัพธ์แรงในชิ้นส่วน
การทำความเข้าใจแรงใน RISA-3D และ IDEA StatiCa
ในขณะที่ RISA ให้เฉพาะแรงด้านซ้าย IDEA ใช้ทั้งแรงด้านซ้าย (ปลาย J) และแรงด้านขวา (ปลาย I) โดยใช้ข้อมูลข้างต้นเกี่ยวกับทั้ง IDEA StatiCa และ RISA-3D จึงมีการปรับค่าดังต่อไปนี้:
ปลาย I:
| XI=-XR | MxI=-MxR |
| VyI=VzR | MyI=MzR |
| VzI=-VyR | MzI=-MyR |
ปลาย J:
| XI=XR | MxI=MxR |
| VyI=-VzR | MyI=-MzR |
| VzI=VyR | MzI=MyR |
หมายเหตุ: การส่งออกไฟล์ SAF ของ RISA-3D ในปัจจุบันรวมเฉพาะข้อมูลหน้าตัดและรูปทรงเรขาคณิตเท่านั้น ไม่รวมผลของแรงกระทำ ซึ่งเป็นเหตุผลที่เอกสารนี้มีความสำคัญ เมื่อถ่ายโอนแรงจาก RISA-3D ไปยัง IDEA StatiCa การทำความเข้าใจการจัดแนวระบบพิกัดของซอฟต์แวร์แต่ละตัวมีความสำคัญอย่างยิ่ง เพื่อการถ่ายโอนแรงที่แม่นยำยิ่งขึ้น ควรพิจารณาติดต่อ RISA เพื่อขอให้รวมผลของแรงกระทำในการส่งออกไฟล์ SAF ในอนาคต